
FIGURE 4.
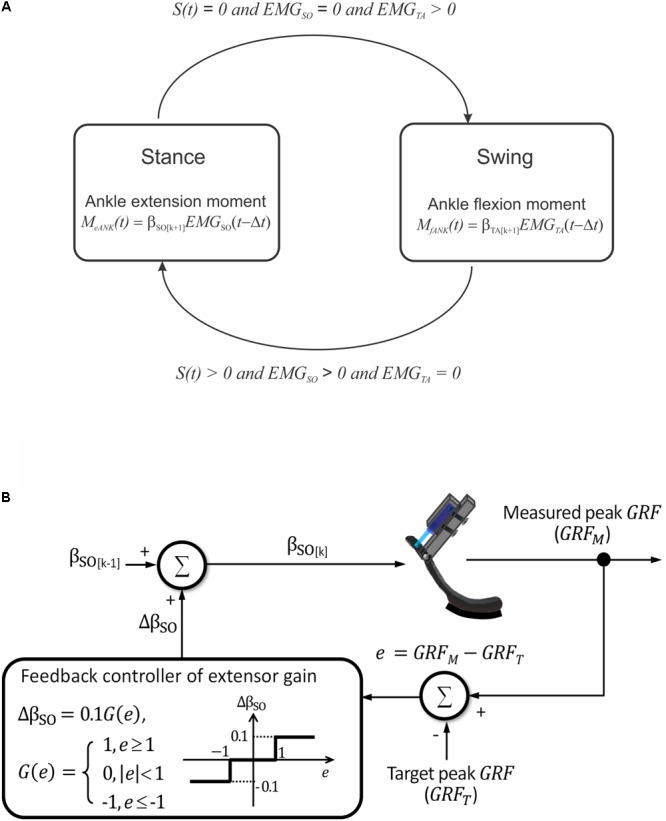
Schematics illustrating prosthesis control. (A) Two finite states of prosthesis loading and conditions for transitions between them. S(t) is a step function indicating presence [S(t) > 0] or absence [S(t) = 0] of ground contact. EMGSO and EMGTA are step functions indicating presence or absence of EMG activity in ankle extensor soleus (SO) and ankle flexor tibialis anterior (TA), respectively. (B) Closed-loop modulation of extension gain bSO. The gain is changed by 10% in each cycle k depending on the value of error e between the measured and target peaks of ground reaction force (GRF).