
Table 3.
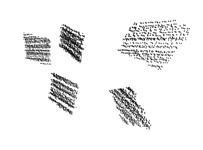
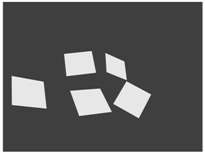
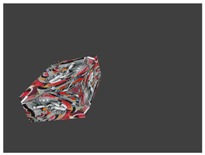
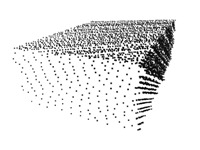
Virtual calibration scenes used for the synthetic tests. Plots from left to right: (i) the 3D scene inside Blensor; (ii) a camera image and (iii) the LiDAR point cloud contaminated by zero-mean Gaussian noise with a standard deviation.
| Method | 3D Scene | Camera | LiDAR |
|---|---|---|---|
| KITTI | 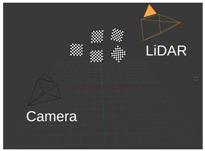 |
 |
 |
| Polygonal | 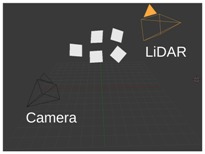 |
 |
 |
| Multi-camera | 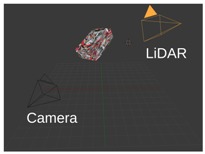 |
 |
 |
| Proposed | 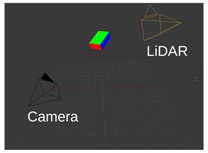 |
 |
 |