
Scheme 3.
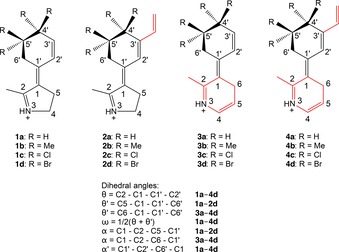
Schiff‐base motors considered in this work shown in their E out isomeric forms and definitions of the dihedral angles for these motors. Motors 1 a–d are reference systems from which motor candidates 2 a–d, 3 a–d, and 4 a–d are obtained by extending the π conjugation, as indicated in red font.