
Fig. 3.
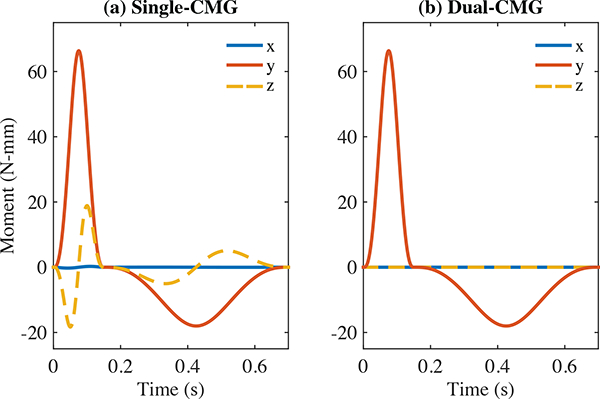
(a) Estimated torque output from rotating a single CMG. When the intended pulse axis is the y axis, there are orthogonal components in the x and z direction that make the haptic cue less clear. (b) Estimated torque output from counter-rotating two CMGs (each with half the inertia of the single-flywheel). The x and z components of the two flywheels cancel, and the y components of each flywheel sum.