
Figure 3. The characterization of the cardiomyocytes on the bio-inspired scaffold.
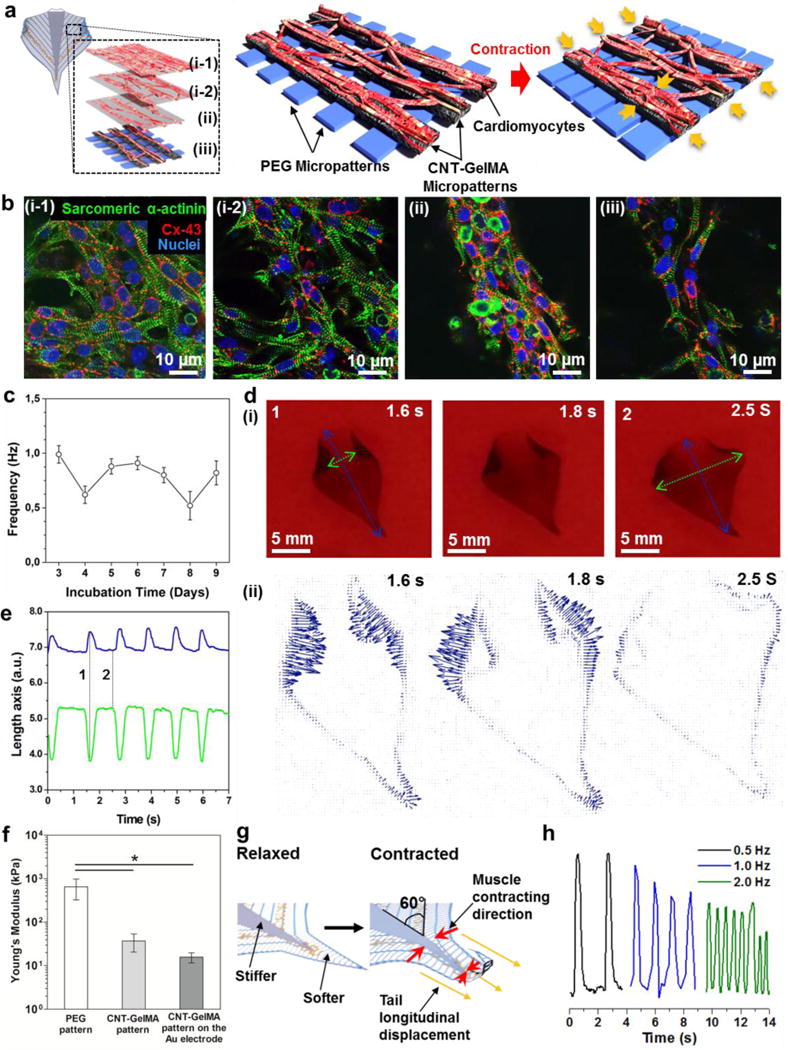
(a) Schematic illustration of the contraction behavior of the cultured cardiac muscle tissue on the bio-inspired scaffold. The cultured cardiac muscle tissue showed a pseudo-3D structure, which could be separated into four layers, the (i-1 and -2) upper, (ii) middle, and (iii) bottom, based on aligned and random cardiomyocyte morphology. (b) Confocal fluorescent images showed different morphology in the (i-1 and -2) upper, (ii) middle, and (iii) bottom of cardiomyocytes cultured on the bio-inspired scaffold for day 5. (c) Spontaneous beating rates of the cardiomyocytes on the bio-inspired scaffold from day 3 to day 9. (d) (i) Photograph of a free-standing bio-inspired soft robot cultured for 5 days at 0, 0.18, and 0.3 sec. The blue line represents the longitudinal axis displacement while the green line represents the transverse axis displacement. (ii) Particle Image Velocimetry measurement of the bio-inspired soft robot spontaneously moved within 0.3 sec. All arrows indicated direction and magnitude of the beating motion. (e) Displacement of the two major axes during stimulated contractions (2.0 Hz, 1 V/cm). The blue line represents the longitudinal axis displacement (corresponding to the blue line in Figure 3d) while the green line (corresponding to the green line in figure 3d) represents the transverse axis displacement. The frame taken in correspondence to the lines marked with 1 and 2 are shown in Figure 3d. (f) Young’s modulus of the PEG hydrogel pattern, CNT-GelMA hydrogel pattern, and the CNT-GelMA hydrogel pattern fabricated on the Au microelectrode. (*p < 0.05) (g) Schematic of the mechanism of tail longitudinal displacement which induces the soft robot displacement along the vertical direction, mainly on the tail part, when the cells contract. (h) Beating response of the bio-inspired soft robot when stimulated with an AC external electrical field at 1V/cm and with various frequencies from 0.5 to 2.0 Hz.