
Fig. 6.
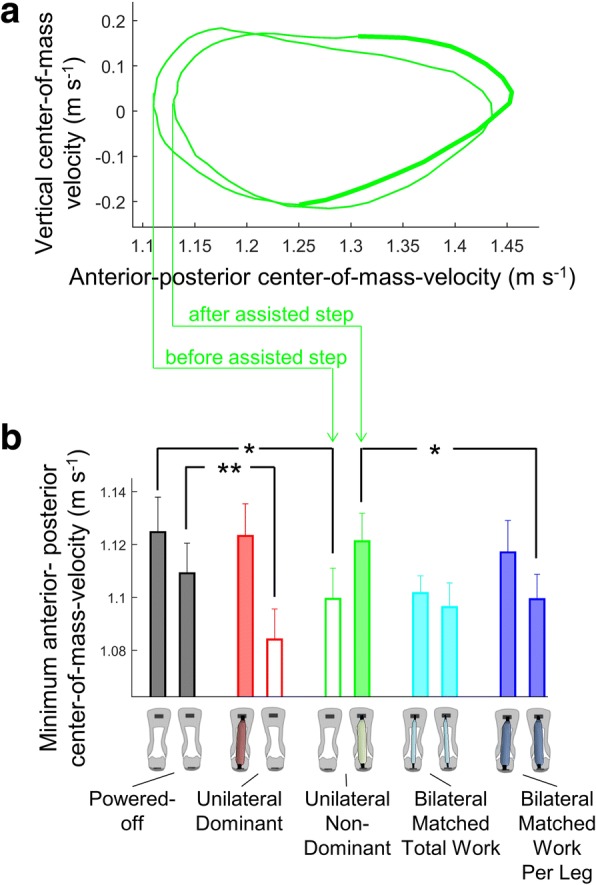
Center-of-mass kinematics. a Vertical center-of-mass velocity plotted versus horizontal center-of-mass velocity from the Unilateral Non-Dominant condition. Wider part of the line represents the assisted portion of the center-of-mass trajectory. b Minimum anterior-posterior center-of-mass velocity. Narrow empty bar plots represent the minimum velocity during the unassisted leg stance. Narrow filled bar plots represent the minimum velocity during the assisted leg stance. Empty wide bar plots represent the bilateral mean. Error bars represent the standard error. Brackets represent significant differences between powered conditions. Only the pairwise comparisons that are relevant for the research questions listed in the methods are analyzed. * is p ≤ 0.05, ** is p ≤ 0.01