
Figure 2.
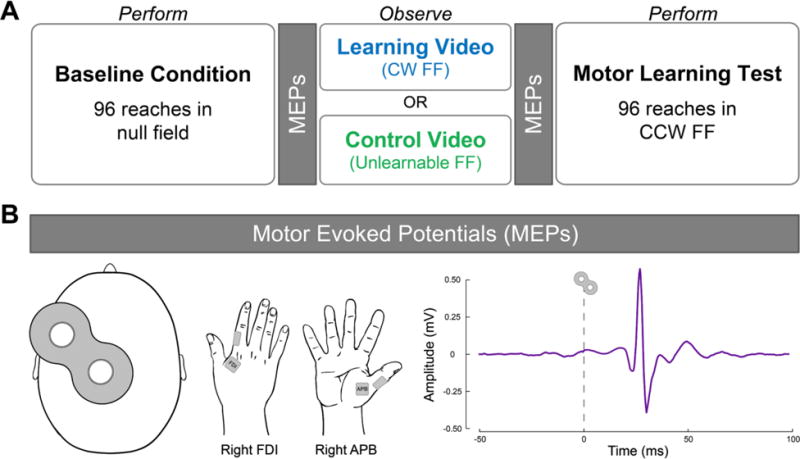
A) Experimental design. In the baseline condition, participants performed reaches in a null field in which the robotic arm applied no force. Fifteen pre-observation MEPs were acquired from the right FDI and APB muscles at rest. Participants then observed either a learning video or a control video. The learning video showed a tutor adapting his reaches to a clockwise force field (CW FF). The control video showed a tutor performing reaches in an unlearnable FF in which the direction of the applied force varied randomly from trial-to-trial. Fifteen post-observation MEPs were then acquired from the right FDI and APB muscles at rest. In the motor learning test, all participants performed reaches in a counterclockwise force field (CCW FF). B) MEPs. Motor evoked potentials (MEPs) were elicited by applying single-pulse TMS over the hand muscle representation of left M1 (shown at far left). MEPs were recorded from the relaxed first dorsal interosseous (FDI) and the abductor pollicis brevis (APB) muscles in the right hand (shown in middle). A sample MEP from one participant is shown on the far right. MEPs were measured peak-to-peak amplitude within the time window from 10-50 ms after TMS. MEPs, motor evoked potentials; FDI, first dorsal interosseous; APB, abductor pollicis brevis; FF, force field; M1, primary motor cortex.