
Fig. 1.
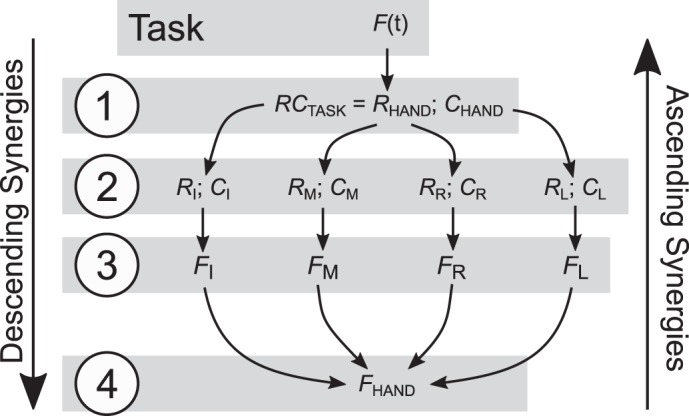
A hypothetical scheme of the neural control of the four-finger total force (FTOT) production task with referent coordinates for the effectors. At level 1, two variables RHAND and CHAND, are specified, based on the desired FTOT. At level 2, these variables result in the {Rf; Cf} pairs for the individual fingers, f = I (index), M (middle), R (ring), and L (little). At level 3, individual finger forces Ff are produced by the corresponding {Rf; Cf} pairs. At level 4, the finger forces sum up to produce hand force, FHAND. At each level, pairs of variables computed from experimental data {XR; k} are used as proxies for the control pairs R and C. Two types of abundant mappings may be associated with synergies, descending (from a higher level to a lower level) and ascending (from a lower level to a higher level).