
Figure 2.
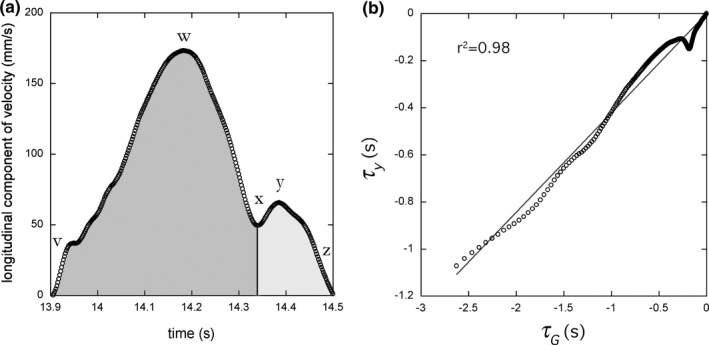
(a) The longitudinal component of velocity, , parallel to the infant's vertebral axis of a typical action unit (see Figure 1). In an action unit this component of velocity is continuously positive or negative. Within an action unit there may exist one or more movement units, defined as a phase of acceleration followed immediately by a phase of deceleration. In (a) the movement accelerates from zero velocity (at v) to a peak velocity (at w), then decelerates before accelerating again (at x) briefly, producing a second, smaller velocity peak (at y) and decelerating again to zero velocity (at z). Thus, this single action unit is composed of two movement units, one (dark grey) from v to x and another (light grey) from x to z. (b) The tau of this full action unit, τ Y(t), is coupled to the tau of its intrinsic guide, τ G(t, T G). In this example, the average coupling constant, k Y,G, given by the slope of the linear regression over the last 90% of the movement, was 0.33, so that, τ Y(t) = 0.33 τ G(t, T G). The proportion of variance accounted for by this τ G ‐coupling equation was 0.98 (the r2 of the regression)