
Figure 1.
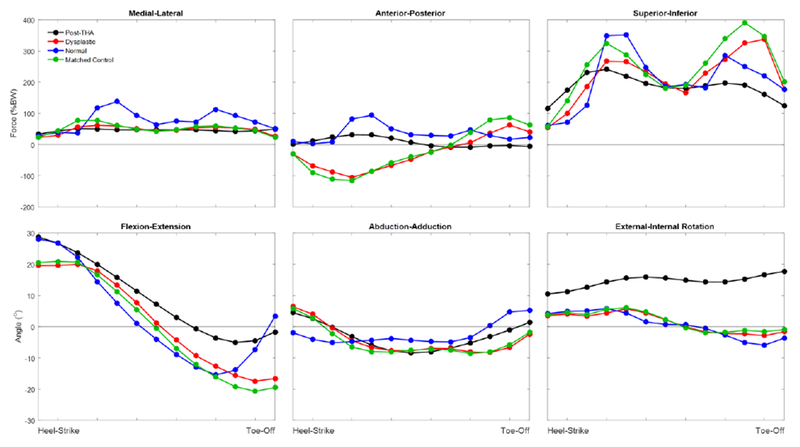
Plots of applied joint reaction forces and hip rotation angles in all three planes of motion. The Bergmann (Post-THA) data were provided as a percentage bodyweight and with associated hip rotation angles (Bergmann et al., 2001a). The Dysplastic and Matched Control data were provided as N/BM2/3 (Skalshoi et al., 2015), which was converted to percentage bodyweight by taking the study’s average patient body mass of 66 kg and multiplying the force data by (66 kg)2/3 to obtain the force in Newtons. The force in Newtons was the divided by (66 kg*9.81 m/s2) and multiplied by 100% to obtain percentage bodyweight for application to the models. The Normal gait pattern that was implemented in the DEA models was taken from a research group that published their joint reaction force data (Anderson and Pandy, 2001a) and their joint angular data (Correa et al., 2010) in two different locations.