
Fig. 3. Magnet-based method for measuring flexion angle.
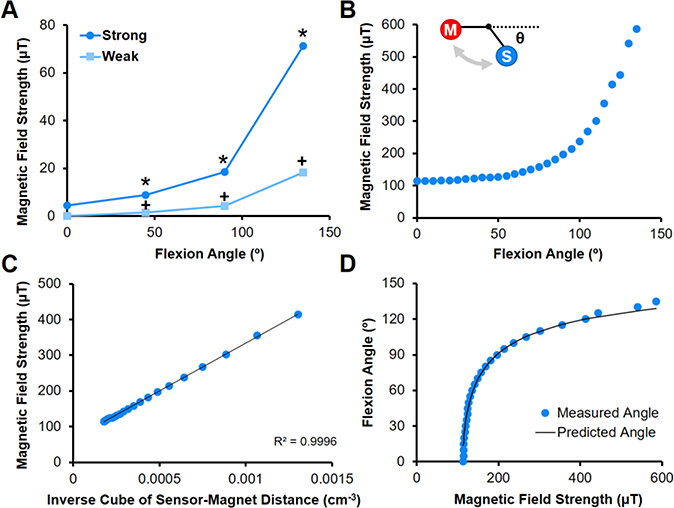
(A) Magnetic field strength as a function of flexion angle for Strong and Weak magnets placed 15 cm from hinge and sensor placed 15 cm from hinge (n=3 measurements/group). *=p≤0.05 vs. Strong, +=p≤0.05 vs. Weak and Strong. (B) Magnetic field strength as a function of flexion angle for Strong magnet placed 10 cm from hinge (sensor placed 7.6 cm from hinge) is used for calibration (n=3 measurements/group). Inset shows flexion angle (Θ) relative to magnet (M) and sensor (S) along a hinge joint. (C) The magnetic field strength is related to the inverse of the distance cubed, and (D) flexion angles are predicted using the law of cosines and compared to measured values.