
Fig 7. Altered joint motion during unprovoked ambulation post-surgery.
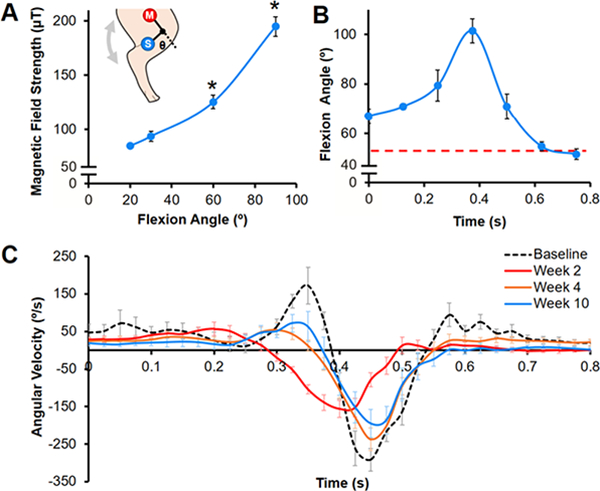
(A) Calibration curve showing magnetic field strength as a function of stifle flexion angle (Θ) (n=3–4 measurements/group). Inset depicts sensor (S) and magnet (M) placement on the hind limb. *=p≤0.05 vs. all other angles. (B) Average flexion angle during a gait cycle at Week 10 for one animal (n=10 steps, mean ± SEM). Red dashed line indicates neutral stance at standing rest. (C) Tibial angular velocity over a gait cycle pre-baseline) and post-surgery for one animal (n=8–15 steps/time point, mean ± SEM).