
Figure 2.
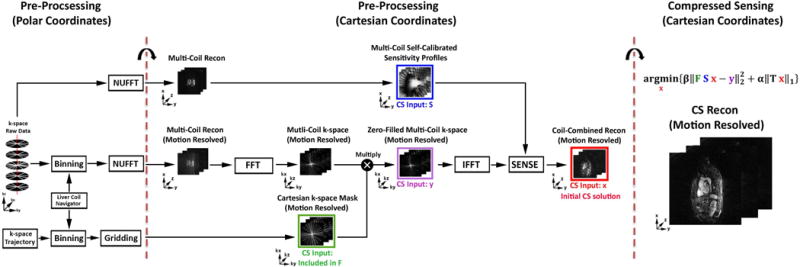
A schematic of the GRASP reconstruction pipeline. Using the navigator ray oriented along the head-to-foot direction to extract the respiratory motion (see Supporting Information Figure S1 for more details), each of six bins were populated with the same number of k-space data by adapting the bin width. In the pre-processing step in polar coordinates, both the non-motion-resolved and motion-resolved stack-of-stars k-space data sets were converted to the corresponding image sets in Cartesian space using NUFFT. The k-space sampling mask in polar coordinates was converted to the corresponding k-space sampling operator (included variable in F) Cartesian space using gridding. In the subsequent pre-processing step in Cartesian coordinates, the coil sensitivities (variable S) were calibrated intrinsically from the non-motion-resolved images as shown. The motion-resolved image in Cartesian space was transformed to k-space using FFT and then multiplied by the k-space sampling operator to produce variable y as shown. Next, the zero-filled, multi-coil, motion-resolved images (variable x) were reconstructed using SENSE along with coil sensitivities as shown. In the CS reconstruction step, we used the finite difference operator as the sparsifying transform along the respiratory dimension and nonlinear conjugate gradient with back-tracking line search as the optimization algorithm with 22 iterations. F represents undersampled FFT, S represents coil sensitivities, and × represents image to be reconstructed, y represents the k-space data, T represents the finite difference operator, α represents the normalized regularization weight, and β represents the normalized fidelity weight.