
Figure 1.
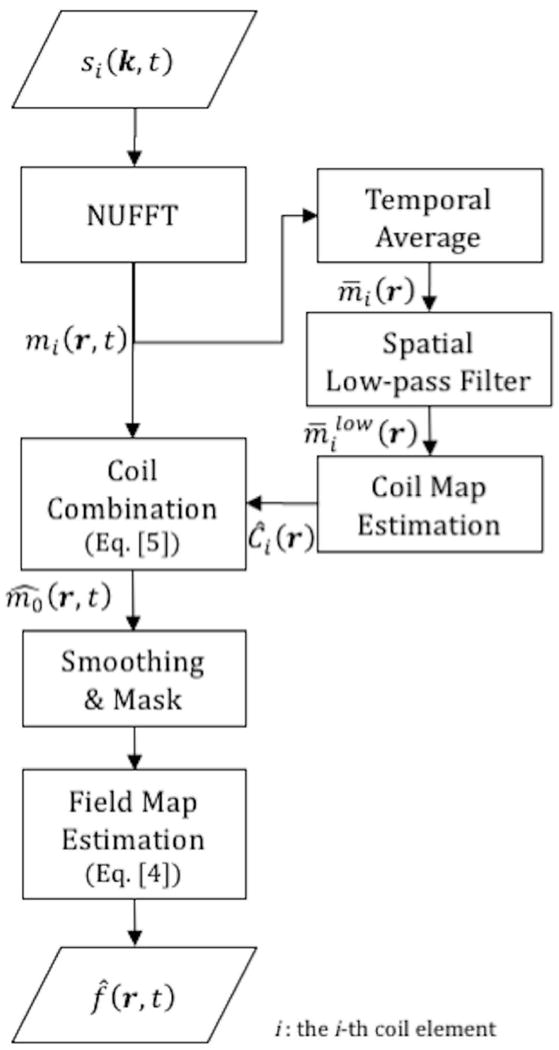
Flow-chart illustrating the proposed field map estimation method. The raw image frames from individual coils are first reconstructed from the raw k-space data using view-sharing with NUFFT. The coil sensitivity maps are estimated from the multi-coil image frames after temporal average and spatial low-pass filter. The multi-coil image frames are then merged into composite image frames using the complex coil maps by Eq. [5]. The composite images are smoothed and masked and a dynamic field map is estimated from the phase of the resulting image frames by Eq. [4].