
Fig. 1:
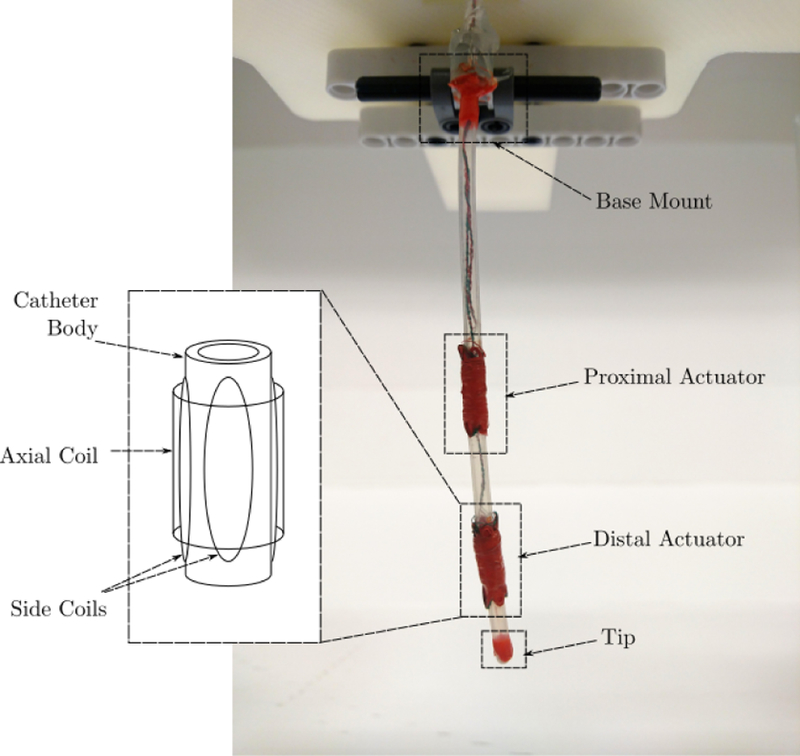
MRI-actuated catheter with two actuators. Each actuator has three mutually orthogonal coils that can generate magnetic moments in any direction. The cross products between the magnetic moments and the MRI scanner’s magnetic field are the torques that remotely steer the robot.