
FIGURE 3.
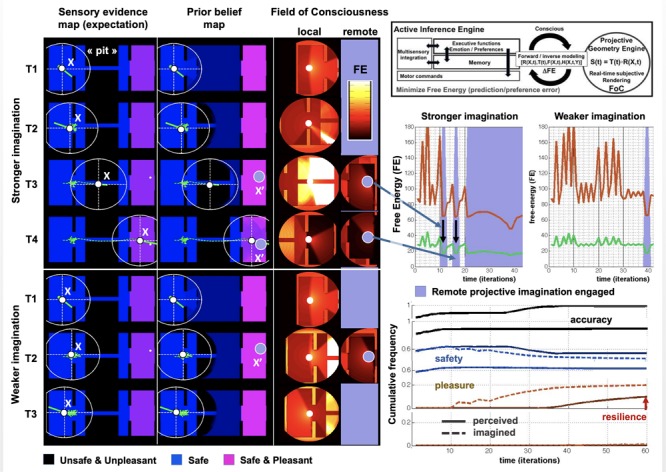
Simplified 2D PCM-based simulation of a pit challenge. (Left Tier) Maps of a 2D world model and agent with a departure room (left: safe and anhedonic) a challenge room with a pit (center: unsafe and unpleasant), a goal room (right: safe and pleasant) (see color code). Sensory evidence maps represent factual observations, prior beliefs maps, the beliefs of the agents, and large white circles their FoC. One simulated agent is more likely to imagine remote options (stronger imagination) than the other (weaker imagination). T1 to T4 stand for time periods. Circular FoC maps show ongoing perceived (local) and transiently imagined (remote) situations; colors index Free Energy (FE, see color bar). (Right Tier, Top) General PCM architecture: a projective geometry engine is controlled by a FE-driven active inference engine. (Middle) Time courses of FE. Optimal FoC perspectives have lowest FE (green line) compared to average of other possible perspectives (red line). (Bottom) Cumulative frequencies of agents’ appraisals across time and belief accuracy. A stronger imagination leads agents to cross the pit after hesitating and reach the goal room, maximizing utility, as goal-related, optimistic projective imagination reduces overall FE near the pit. As a result, there is a gain in pleasure or resilience versus initial conditions (red arrow), and exploration with prior updating increases accuracy. A lower imagination leads agents not to explore the environment, never enjoy a better condition or greater accuracy, and to repetitively wander locally. (See Rudrauf and Debbané, 2018 for more details on this particular family of simulations.)