
Figure 2.
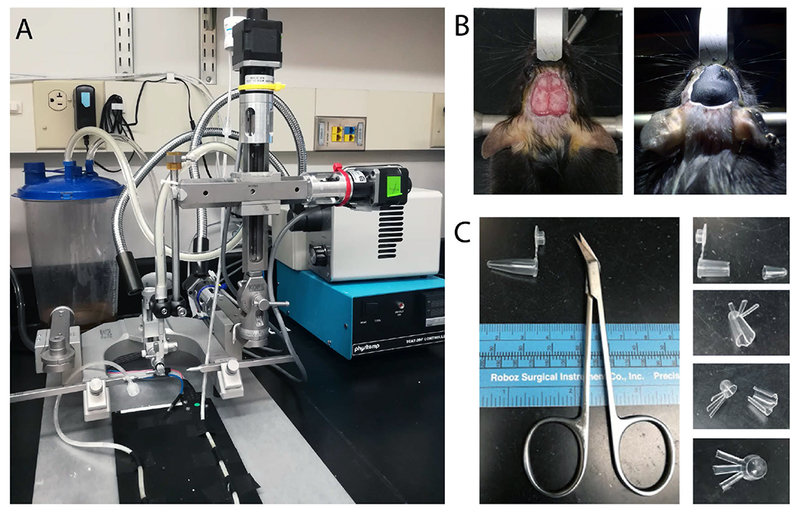
(A) Robotic surgical instrument, which includes three arms connecting three stepper motors individually; the motors are controlled by three USB-based motor controllers via MATLAB-based (Mathworks) GUI software. A syringe holding a 30-gauge blunt-end needle is parallelly mounted on the dorsal-ventral stereotaxic arm, and is connected to the vacuum pump. (B) Left, cleaned skull area; Right, GRIN lens is secured with two layers of dental cement. (C) Procedures for making GRIN lens cap from PCR tube bottom.