
Fig. 3.
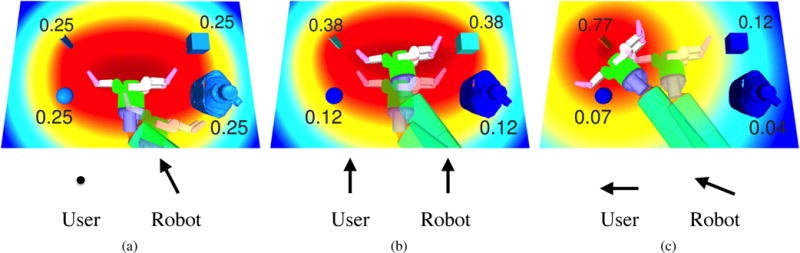
Estimated goal probabilities and value function for an object grasping trial. Top row: the probability of each goal object and a 2-dimensional slice of the estimated value function. The transparent end-effector corresponds to the initial state, and the opaque end-effector to the next state. Bottom row: the user input and robot control vectors which caused this motion. (a) Without user input, the robot automatically goes to the position with lowest value, while estimated probabilities and value function are unchanged. (b) As the user inputs “forward”, the end-effector moves forward, the probability of goals in that direction increase, and the estimated value function shifts in that direction. (c) As the user inputs “left”, the goal probabilities and value function shift in that direction. Note that as the probability of one object dominates the others, the system automatically rotates the end-effector for grasping that object.