
Fig. 4.
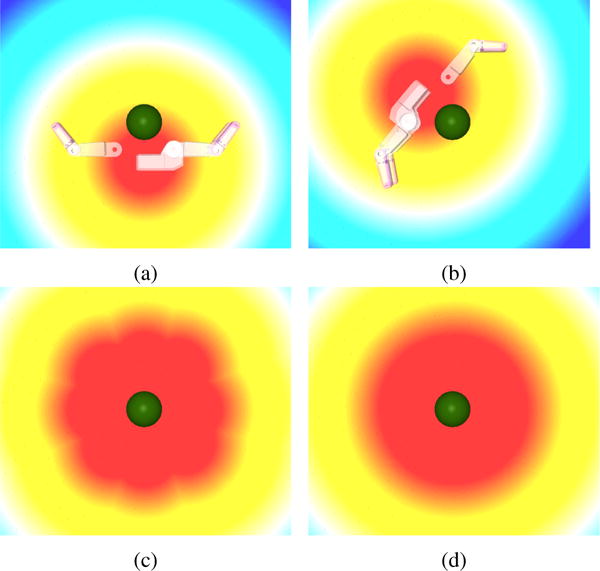
Value function for a goal (grasp the ball) decomposed into value functions of targets (grasp poses). (a, b) Two targets and their corresponding value function Vκ. In this example, there are 16 targets for the goal. (c) The value function of a goal Vg used for assistance, corresponding to the minimum of all 16 target value functions (d) The soft-min value function Vg≈ used for prediction, corresponding to the soft-min of all 16 target value functions.