
Fig. 9.
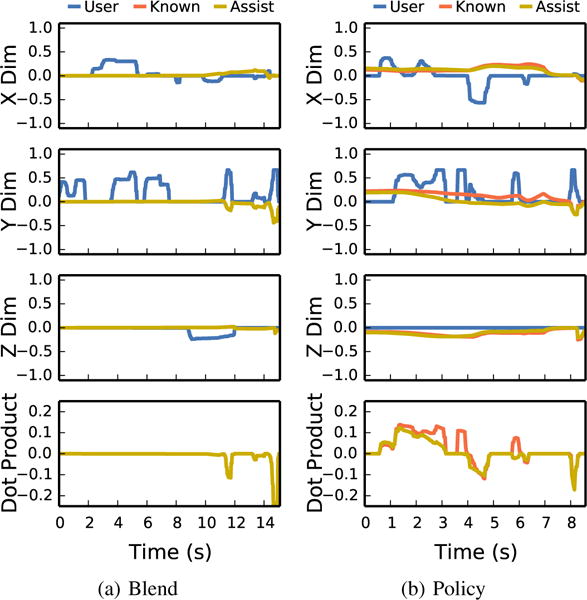
User input and autonomous assistance for a user who preferred blending, with plots as in Fig. 8. The user inputs sometimes opposed the autonomous assistance (such as in the ‘X’ dimension) for both the estimated distribution and known goal, suggesting the cost function didn’t accomplish the task in the way the user wanted. Even still, the user was able to accomplish the task faster with the autonomous assistance then blending.