
Figure 1:
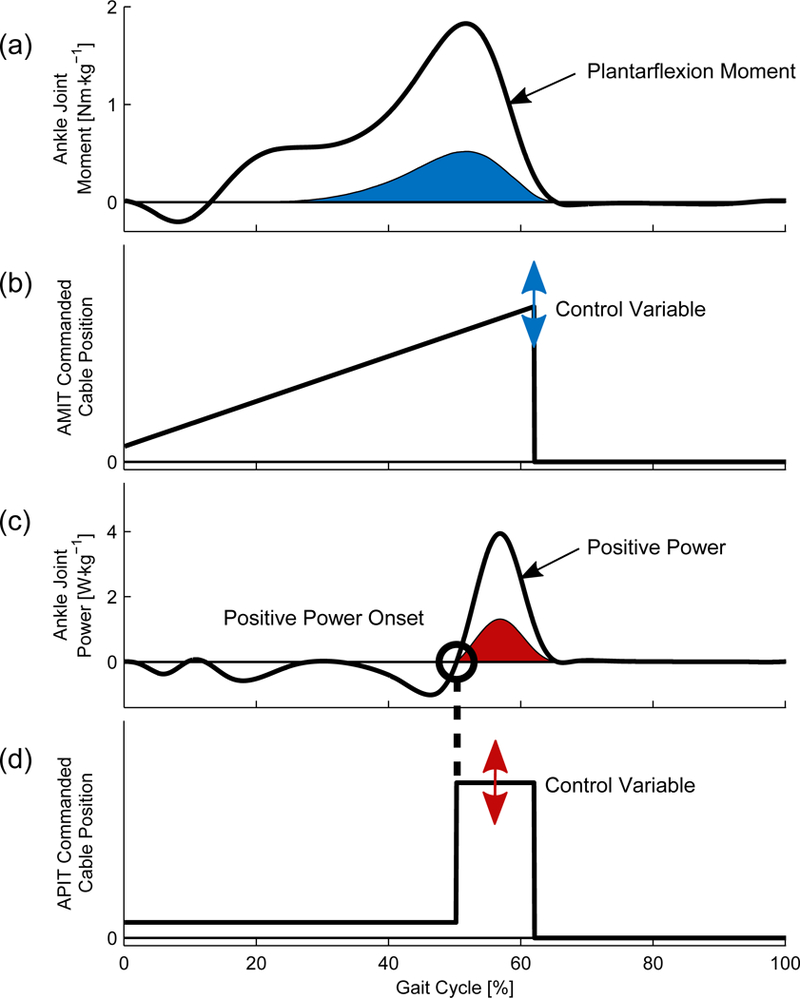
Example position trajectories of the AMIT (a & b) and APIT (c & d). The AMIT performs a force-based position control in attempt to produce a percentage of the ankle moment. The APIT performs power-based position control using the ankle speed zero-crossing to ensure that assistance delivered by the exosuit coincides with the positive biological ankle power.