
Figure 1: Stochastic model of bidirectional cargo transport.
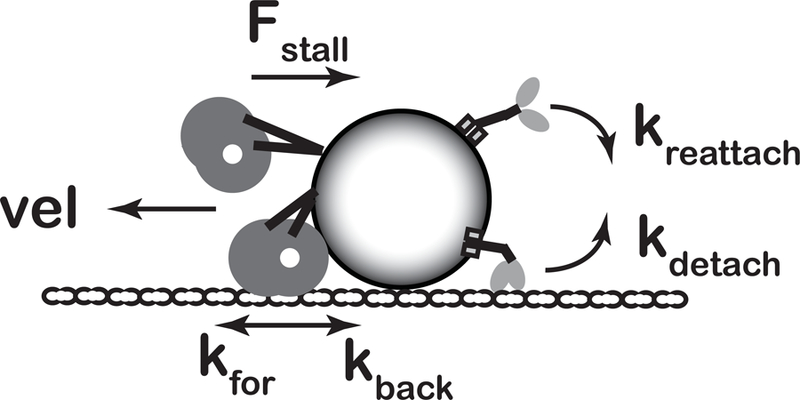
Kinesin and dynein motors are attached to a shared cargo and motor stepping and detachment/reattachment modeled using published parameters. Single-molecule forward and backward stepping rates, kfor and kback, depend on load, and motor velocity is equal to the net stepping rate multiplied by the 8 nm step size. The stall force, Fstall, is defined as the force at which kfor = kback and thus velocity is zero. Motor detachment is modeled as a slip-bond with an exponential dependence on load, , where k0det is the unloaded off-rate and Fdet is the detachment force parameter. Motors that detach from the microtubule reattach with first-order on-rate, kreattach. At every time step, each motor can step forward or backward, or detach or reattach from the microtubule. See Methods for model details and parameters.