
Fig. 12.
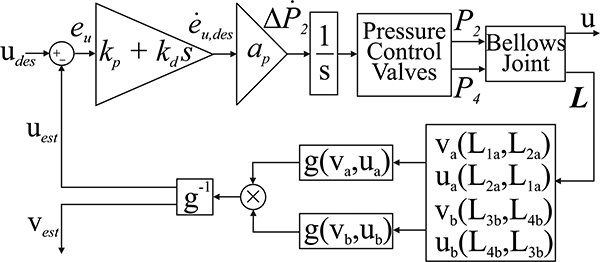
The feedback controller for the joint relied on the inductance-based estimates of the rotation components u and v. The performance of this controller was compared to one driven with feedback from the IMU.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
The feedback controller for the joint relied on the inductance-based estimates of the rotation components u and v. The performance of this controller was compared to one driven with feedback from the IMU.