
Fig. 5.
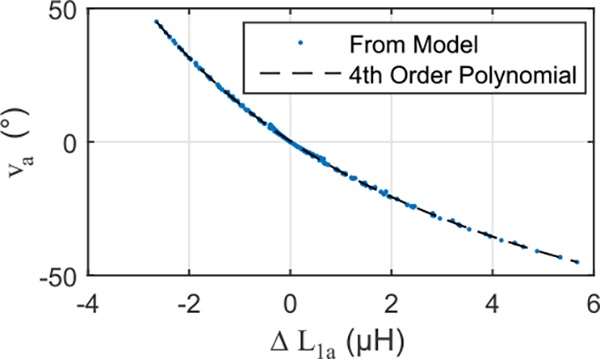
The results of the inductance model for the joint used in this work. Much of the variation in the rotational compnents (e.g. va) is explained by a simple polynomial regression against the inductance of a coil on the length-changing bellows (e.g. L1a).