
Fig. 9.
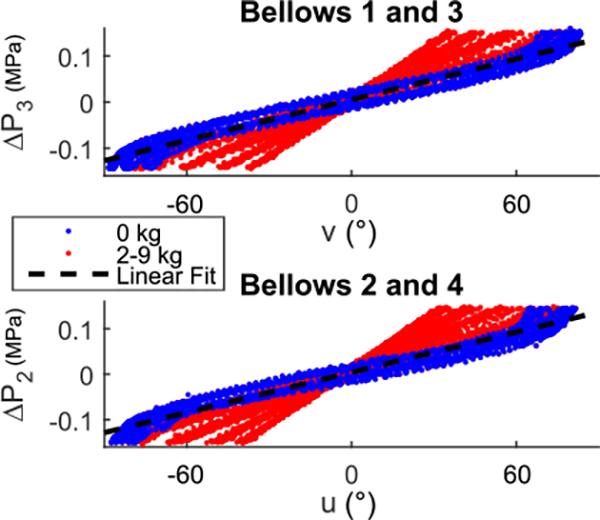
Shown are the pressure and orientation combinations recorded during the calibration. Because the pressure is being adjusted much slower than the joint dynamics, the relationship between the pressure and angle values shown here can be approximated as steady-state.