
Fig. 1.
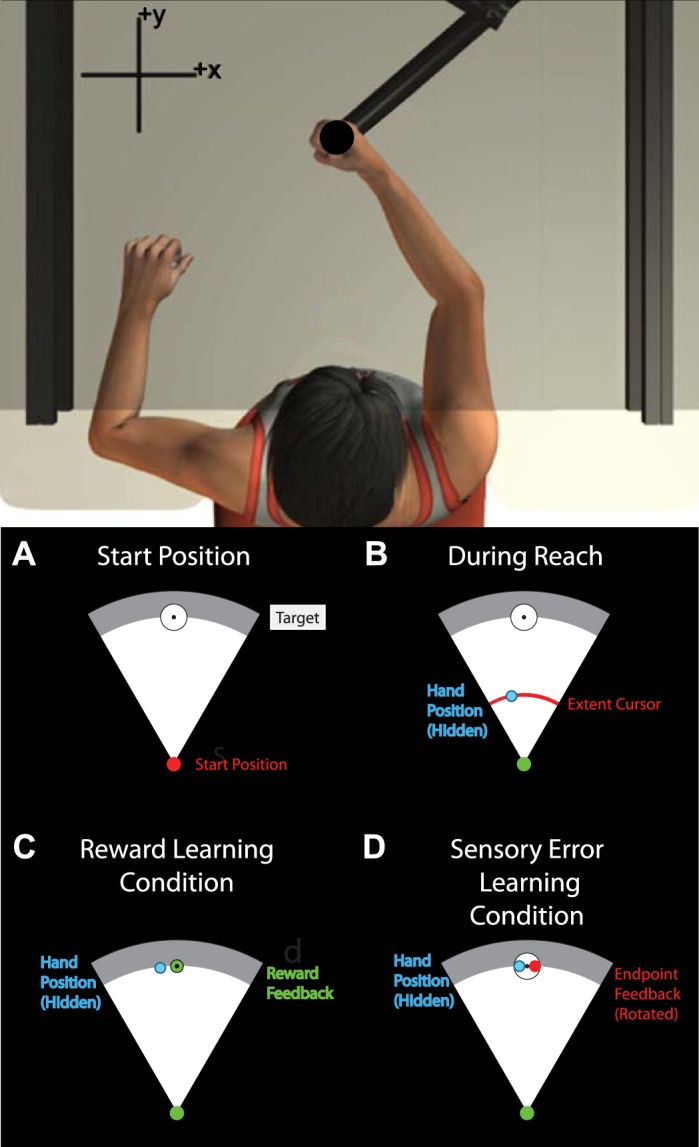
Experimental setup. A: participants (n = 20) reached to visual targets while holding the handle of a robotic arm. Vision of the arm was obscured by a screen that displayed visual information related to the task. B: during reaches, hand position was hidden but an arc-shaped cursor indicated the extent of the reach without revealing reach angle. Feedback was provided at reach end point. C: in the reward learning condition, binary feedback represented whether reaches were successful or unsuccessful in hitting the target by turning green or red, respectively. Reach adaptation was induced by providing reward for movements that did not necessarily correspond to the visual target. D: in the visuomotor rotation condition, feedback represented the end-point position of the hand. Adaptation was induced by rotating the angle of the feedback relative to the actual reach angle.