
FIGURE 4.
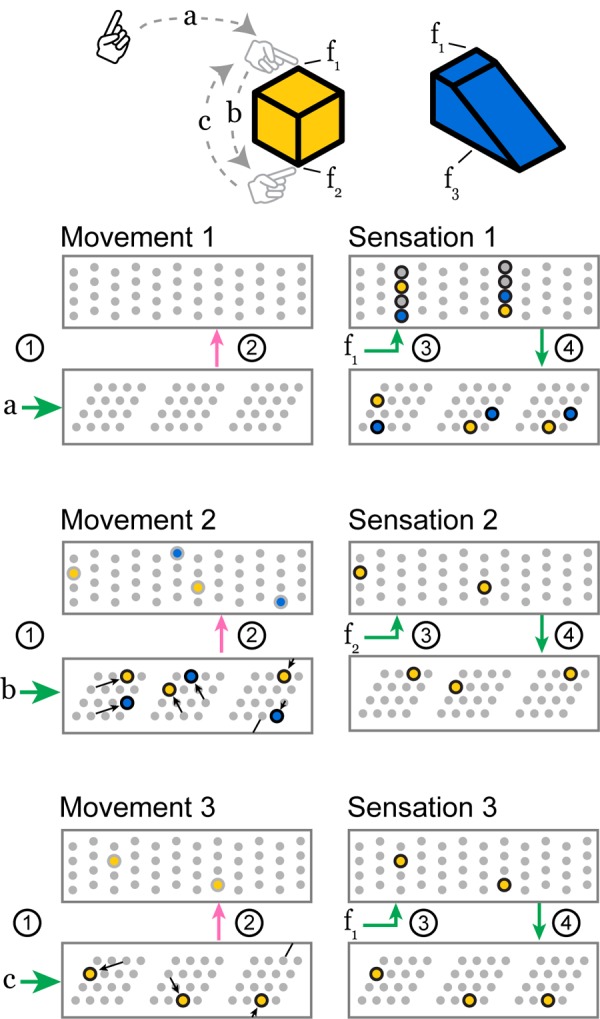
As the sensor moves over a previously learned object, these two layers receive a sensorimotor sequence and recognize the object. Features f1, f2, and f3 indicate the sensory input invoked by touching the objects at the indicated locations. Motor commands a, b, and c indicate the motor input received by the network when the sensor makes a movement. The objects are colored to relate them to active cells below. We show three movements, each consisting of the four stages above, and we draw snapshots of the network at the end of stages 2 and 4. The stages 1 through 4 correspond to the connections in Figure 3. Movement 1: The network receives a movement command, and nothing happens because it does not have a current location representation. Sensation 1: The sensor senses feature f1 which provides input to every cell in a set of mini-columns. None of the cells were predicted, so all become active. This feature has been learned on two objects, so this set of active cells contains two feature-at-location representations, shown in yellow and blue. These representations drive a pair of location representations to become active. This union of activity encodes the two possible locations that could have produced the sensation. Movement 2: Motor input b causes each module to perform path integration, shifting its bump according to its scale and orientation. The newly active cells provide modulatory input to the sensory layer which predicts two different potential features, f2 and f3, priming two representations to become active. Sensation 2: The sensor senses feature f2, and only the predicted cells in the f2 mini-columns become active. The other predicted cells do not activate. This active representation drives a single representation to become active in the location layer. At this point, the network has identified the cube. Movement 3 and Sensation 3: Subsequent movements maintain the unambiguous representation as long as the sensed features match those predicted by the path-integrated locations. A movement back to the original location, for instance, causes a prediction only for the f1 representation specific to that location on the cube.