
Figure 2.
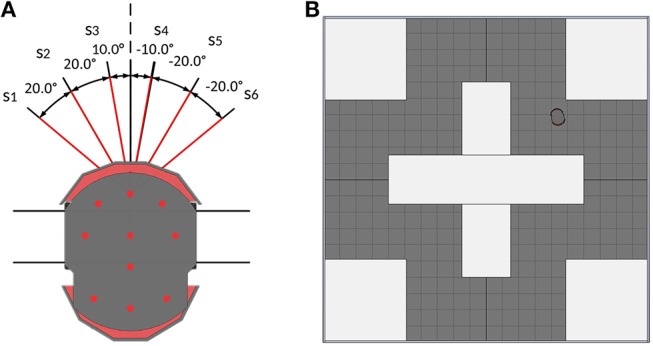
(A) The Pioneer robot with its 6 on-board sonar sensors. Red line denotes the sensors used for the obstacle-avoiding task. (B) Top-view of the V-REP scene that is used to collect the data for the obstacle-avoiding dataset.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
(A) The Pioneer robot with its 6 on-board sonar sensors. Red line denotes the sensors used for the obstacle-avoiding task. (B) Top-view of the V-REP scene that is used to collect the data for the obstacle-avoiding dataset.