
Fig. 6. Dynamic manipulation of single microparticles via wave number–spiral acoustic tweezers.
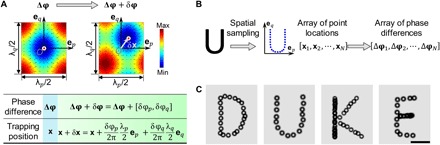
(A) The principle for dynamic manipulation of single microparticles. The Gor’kov potential fields with acoustic radiation forces (small arrows) generated by two orthogonal pairs of IDTs are simulated (top). When phase differences change from Δφ to Δφ + δφ, where Δφ = [Δφp, Δφq] and δφ = [δφp, δφq], the potential well is shifted by a vector δx, and thus, a single microparticle trapped in the well is translated by δx. The relation of phase difference and trapping position is summarized in a table (bottom). (B) Dynamic single-particle translation along desired paths can be performed through three steps. First, through spatial sampling, the desired path is converted to an array of points at coordinates [xn]N. Second, the coordinates are transformed to an array of phase differences [Δφn]N. Third, the dynamic single-particle translation is executed by following the predetermined phase differences and gradually modulating them in excitation signals. (C) Stacked optical images acquired during dynamic manipulation show that microparticles can be translated along complex paths, and their trajectories precisely depict four letters: “D,” “U,” “K,” and “E.” Scale bar, 50 μm.