
Figure 1.
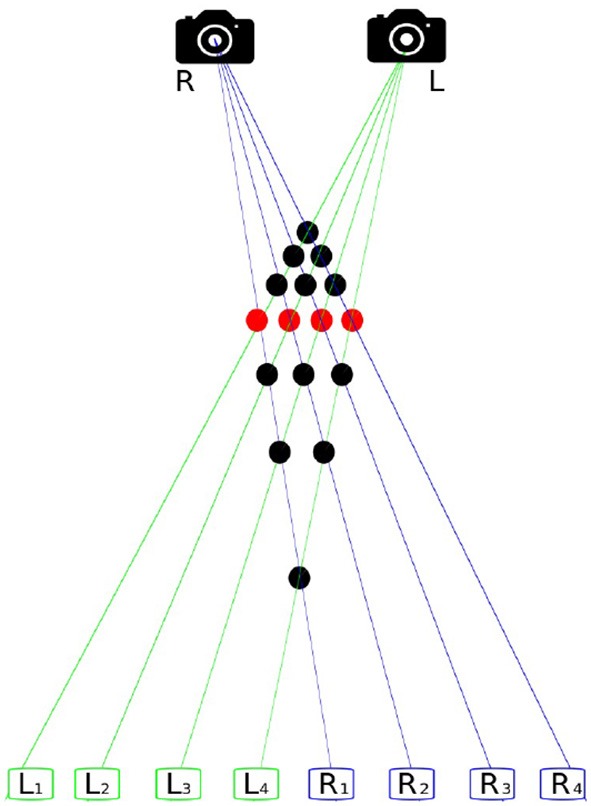
The correspondence problem. The scene comprises four identical objects, recorded from two perspectives. R is the right and L the left camera. The rectangles L1–L4 represent the imaging of L and R1–R4 of R. There are 16 possible matches, visualized by dots, showing how the shots of L and R might correspond to each other. Only four of them, accentuated in red, are correct matches.