
Figure 2.
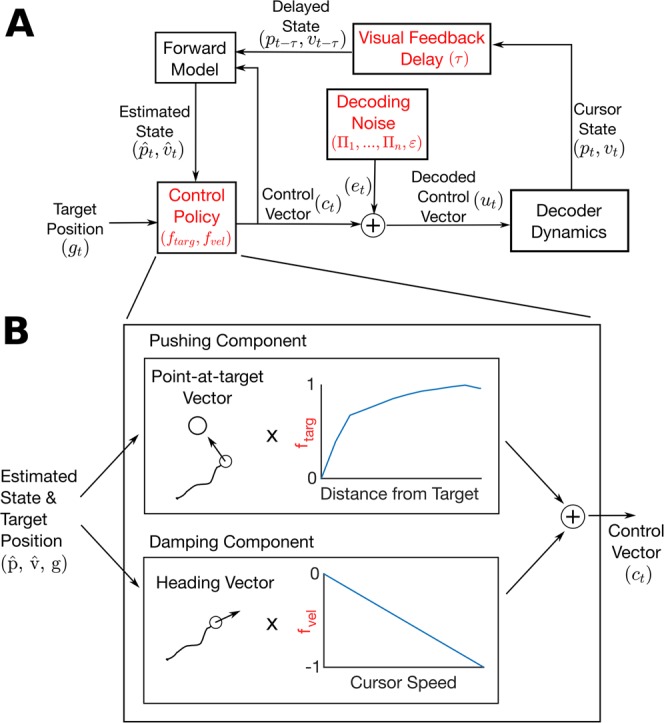
Illustration of the piecewise-linear feedback control model (PLM) used to simulate iBCI performance in this study. (A) Diagram of the feedback control model, with elements that are customized to each user shown in red. In the model, the simulated user receives delayed visual feedback of the cursor position and velocity. From the delayed feedback, the simulated user employs a forward model to estimate the current state of the cursor. The estimated cursor state and target position are then used to compute a control vector based on the user’s control policy. Finally, decoding noise, parameterized by an autoregressive model, is added to the control vector to simulate the decoder output. The decoder output is smoothed by first order smoothing dynamics and integrated to yield the cursor state. (B) Illustration of the control policy block. The user’s control vector is computed as the sum of a pushing component (a point-at-target vector weighted by the piecewise linear function ftarg) and a damping component (a heading vector weighted by the piecewise linear function fvel). The pushing component causes the cursor to move towards the target and the damping component slows down the cursor as needed to avoid overshooting the target (note that fvel is negative).