
Figure 1.
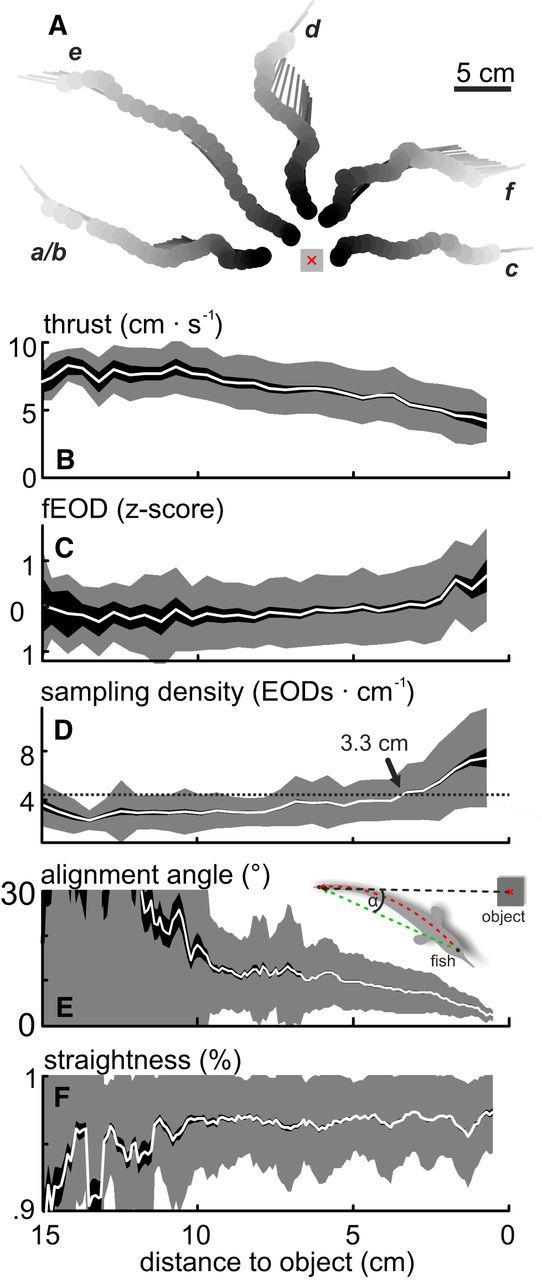
Object approach behavior. A, Example trajectories of the “object approach behavior.” Top view, Filled dots and lines indicate head position and body orientation at the time of EOD emission, respectively. Gray shading represents the temporal order within each sequence. The object was an 8 cm3 metal cube (gray scheme, red crosshair represents center of mass). Letters indicate individual trajectories that are used in Figure 2. B–D, Average sampling behavior during the approach. Top to bottom, Parameters shown are as follows: thrust (B), EOD frequency (C; values were z-scored for individual recording sessions), and sampling density (D). Whereas thrust decreased steadily with increasing proximity to the object, EOD frequency increased. The sampling density reflects the number of EODs emitted per centimeter traveled. Sampling density increased with increasing proximity to the object and was significantly elevated from baseline at a distance of 3.3 cm (dotted line and arrow). These data are pooled for approaches to different object sizes because no significant differences were found (see also Materials and Methods). E, F, Average of postural parameters of the approach behavior. Parameters shown are as follows: body-object alignment (E) and straightness of the body (F). Alignment increased (decreasing values) while the overall body curvature was reduced with increasing proximity to the object (F). E, Inset: Scheme of how the alignment angle (α) and the straightness were obtained (see Materials and Methods). B–F, Mean (white line) ± SEM (dark shading) and standard deviation (light shading) as calculated from pooled data of all “object approach” sequences (N = 235, 11 fish).