
Figure 4. Dimensionality reduction reveals the manifold structure of limb coordination patterns.
(A) UMAP embedding of limb coordinate time series colored by the mean frequency of forward walking. Frequency (correlated with forward walking velocity) maps to the height along the vase-shaped manifold. (B) Embedding colored by the mean-subtracted positions of the left and right midlimbs. The global phase of the walking behavior defines the location along a cross-section of the manifold. (C) Tripod (green), tetrapod-like (orange), and non-canonical (purple) trajectories from Figure 3F–G embedded in the UMAP space. Start of each trajectory is indicated by a black circle. Arrows indicate the trajectory direction. (D) Embedding colored by number of feet in stance. The number of feet in stance changes with a periodicity of two per cycle at all forward walking speeds.
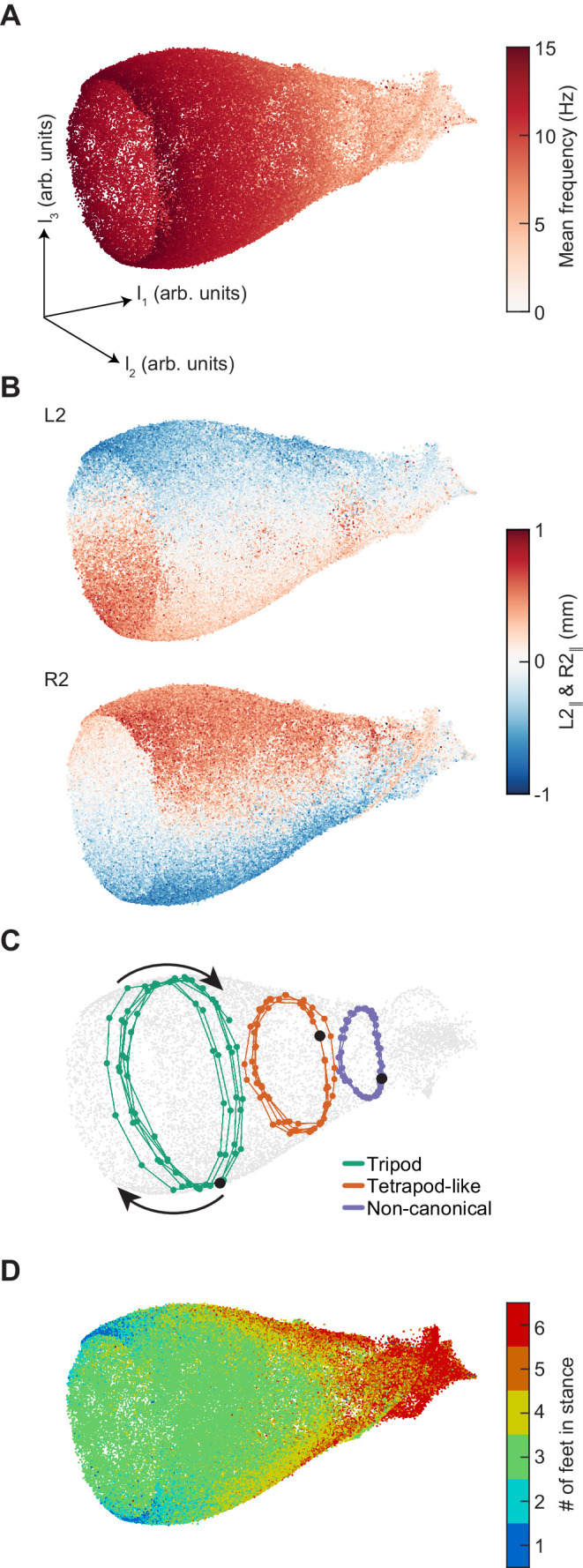
Figure 4—figure supplement 1. Principal component analysis of limb kinematic data.

Figure 4—figure supplement 2. Representation of UMAP embedding in cylindrical coordinates.

Figure 4—figure supplement 3. Contralateral antiphase is preserved at all phases of the global oscillator.

Figure 4—figure supplement 4. Changing the segment duration dilates the axial extent of the UMAP manifold while maintaining the same structure.

Figure 4—figure supplement 5. The manifold structure of synthetic canonical gaits differs qualitatively from that of free-walking Drosophila.
