
Figure 1.
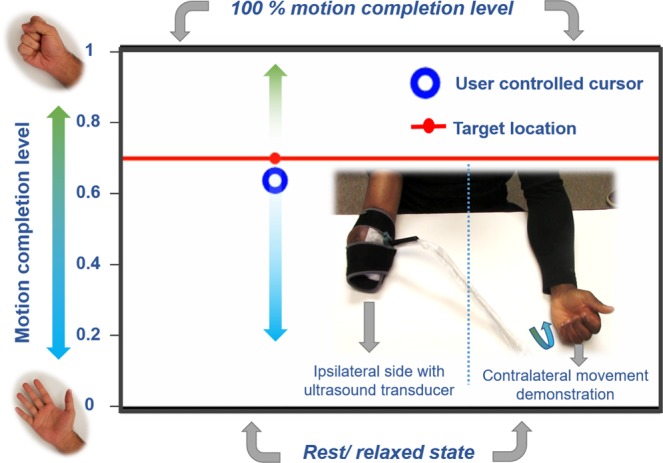
Photograph of the experimental setup showing an individual with transradial amputation instrumented with an ultrasound transducer on the residuum (inset). The interface for the target holding motion control task described in experiment 2 shows the target position, movement bounds and the cursor position, which is controlled by muscle deformations in the subject’s residuum. Participants with unilateral amputation were asked to demonstrate the perceived motion using their contralateral intact limb.