
Figure 2.
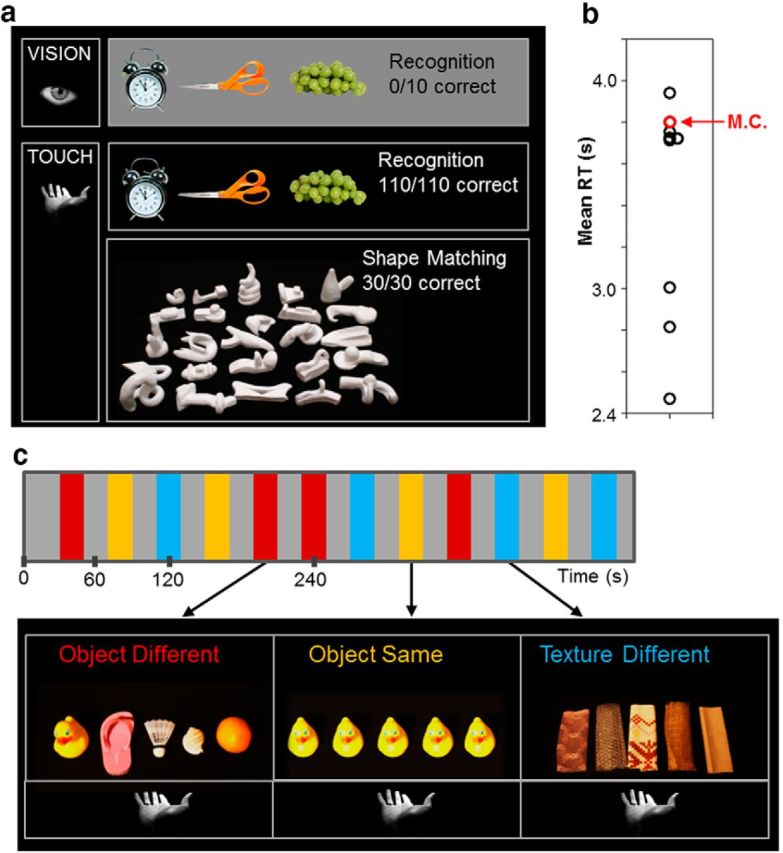
a, Behavioral object identification accuracy in M.C. Using vision (top), M.C. was unable to identify any common everyday objects whether they were displayed in the form of real-world 3D objects or as 2D color pictures. M.C. made no errors, however, in identifying a large set (n = 110) of everyday objects using touch alone (bottom). We also tested M.C.'s haptic recognition of novel 3D clay objects (James et al., 2002; James et al., 2005). M.C. made no errors in deciding whether two consecutively explored novel objects were the same or different in shape. b, RTs to recognize everyday objects via touch in M.C. were similar to age-matched controls. Open circles in the vertical point plot represent mean RT for each individual. M.C.'s mean RT (red circle) was well within the range of RTs shown by controls (black circles; t = 0.23, p = 0.83). c, Protocol used in the main haptic fMRI experiment. Participants used the right hand to palpate in three conditions within a block design: touching different textures (texture different), touching different objects (object different), and repeatedly touching identical objects (object same). Somatosensory blocks were interleaved with blocks of rest and the order of somatosensory conditions was counterbalanced across scans.