
Figure 3.
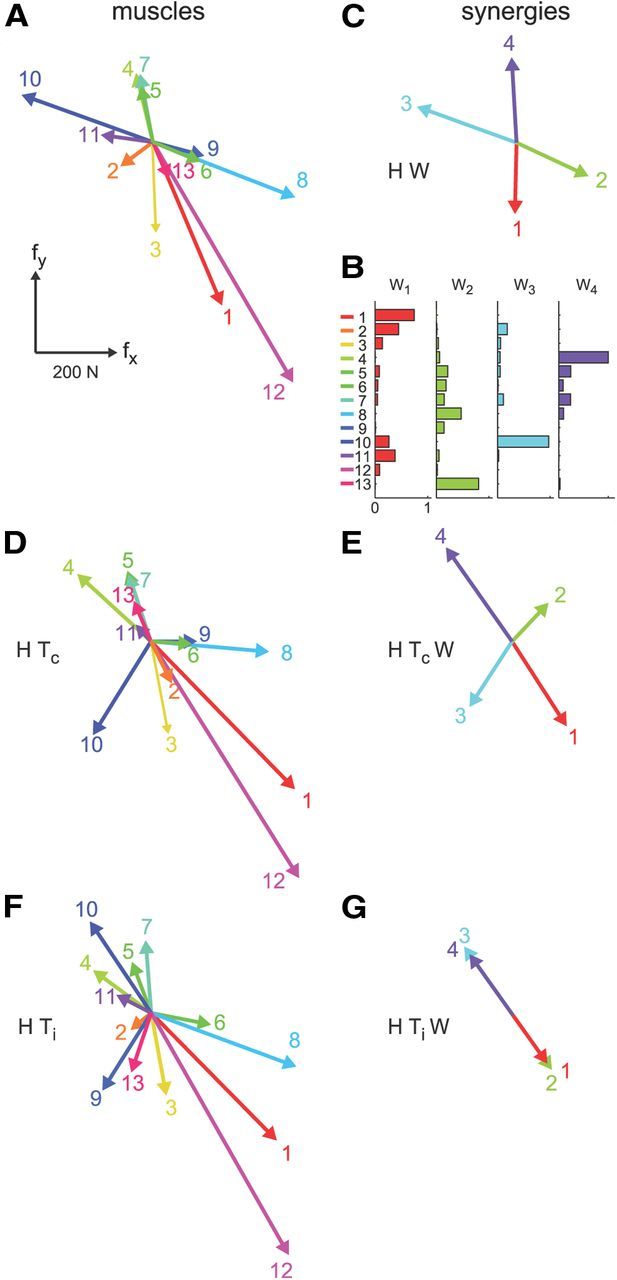
Examples of EMG-to-force matrix, synergies, and virtual surgeries. A, EMG-to-force matrix H estimated for Subject 2 from EMG and force data recorded during the generation of planar isometric forces. Each column of H, representing the planar force generated by one muscle, is illustrated by a colored arrow (1, brachioradialis; 2, biceps brachii short head; 3, biceps brachii long head; 4, triceps brachii lateral head; 5, triceps brachii long head; 6, infraspinatus; 7, anterior deltoid; 8, middle deltoid; 9, posterior deltoid; 10, pectoralis major; 11, teres major; 12, latissimus dorsi; 13, middle trapezius). B, Muscle synergies (matrix W) are identified by nonnegative matrix factorization from the EMG data. Each column of W, a vector specifying a specific pattern of relative level of muscle activation, is illustrated by color-coded horizontal bars. C, Forces associated with each muscle synergy (i.e., columns of the matrix product H W) span the entire force space. D, Forces generated by muscles after a compatible virtual surgery obtained by recombination of the original forces as after a complex rearrangement of the tendons (Tc). E, Synergy forces after the compatible surgery still span the force space. F, Muscle forces after an incompatible surgery generated by a rotation matrix (Ti) that maps a vector in the column space of W into a vector in the null space of H. G, Such rotation aligns the forces associated with all synergies in the same direction; thus synergy forces after the incompatible surgery do not span the entire force space.