
Figure 3.
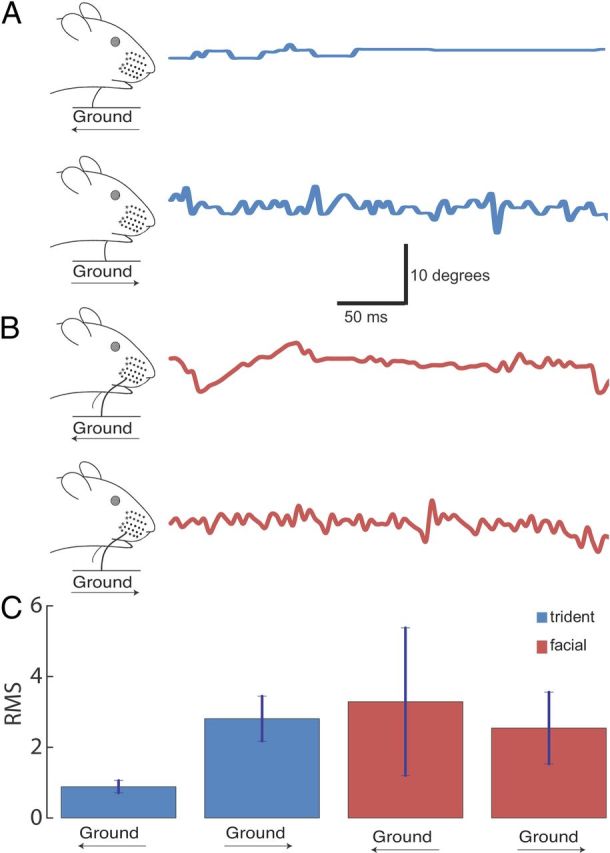
Backwards ground movement (corresponding to forward movement of the animal) yields smooth deflections of trident but not of facial whiskers. A, Left, Illustration depicting direction of ground movement while the midline trident whisker was in contact with the ground during the recording period. A, Right, Blue line indicates trident whisker deflection angle over the course of a trial. Data were collected using high-speed videography (240 frames/s) taking the trident whisker tip and the whisker origin as references for angular measurements. Note the smooth and jerky deflection pattern for backward and forward ground movement, respectively. B, Left, Illustration depicting the direction of ground movement while the facial whisker was in contact with the ground during the recording period. B, Right, Red line indicates facial whisker deflection angle over the course of a trial. C, Average root mean squared values of trident (blue) and facial (red) whisker deflection angles during a 500 ms trial (n = 2 animals). Surprisingly, different ground velocities (range 1–50 cm/s) resulted in different deflection patterns at our sampling rate (240 Hz) and data were pooled across velocities. Animal averages were calculated from 3 different ground velocities per animal. Bars indicate mean ± SE.