
Figure 6.
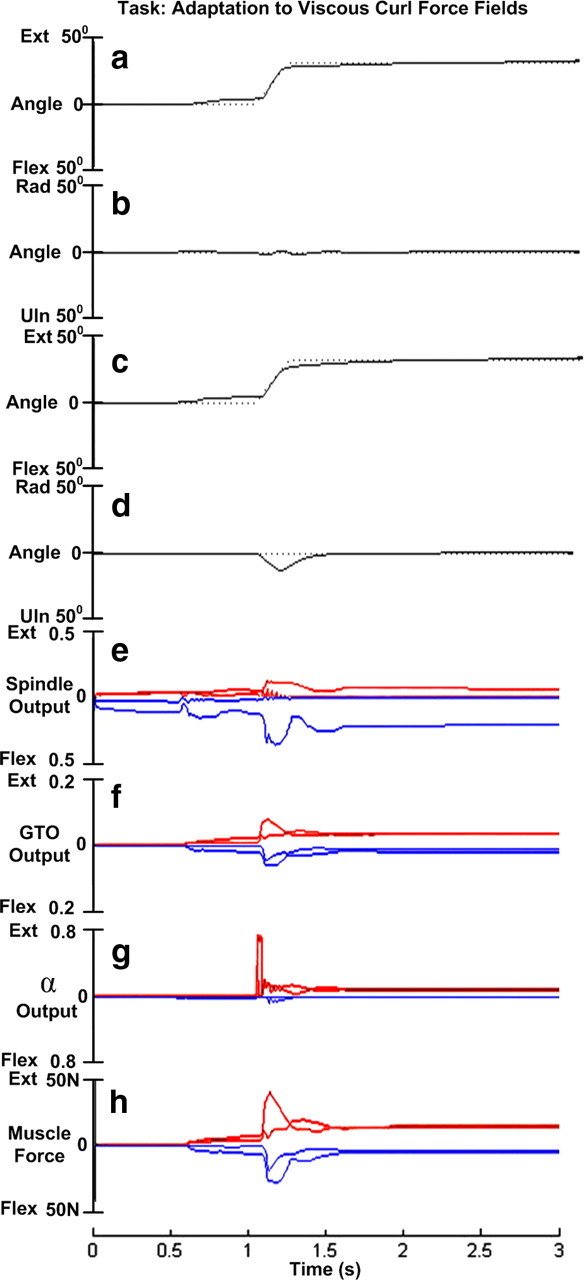
Adaptation to viscous curl force fields. a, Tracking a desired trajectory (dotted black line) in the presence of viscous force field perturbations. The gradient descent algorithm optimized the control inputs to produce extension (solid black line) that closely tracked the desired trajectory. b, Radio-ulnar deviation in the presence of viscous curl force fields reduced from 35° to nearly 0° (solid black line) after optimization. c, d, Aftereffects when the curl force field was removed. e, Primary afferent response from the muscle spindles in each of the four muscles after adaptation (two extensor muscles in red plotted upward; 2 flexor muscles in blue plotted downward). f, Responses from the four Golgi tendon organs after adaptation. g, Output of motoneurons exciting the extensor muscles (red) and flexor muscles (blue), after adaptation. h, Extensor (red) and flexor (blue) muscle force modulation after adaptation.