
Figure 1.
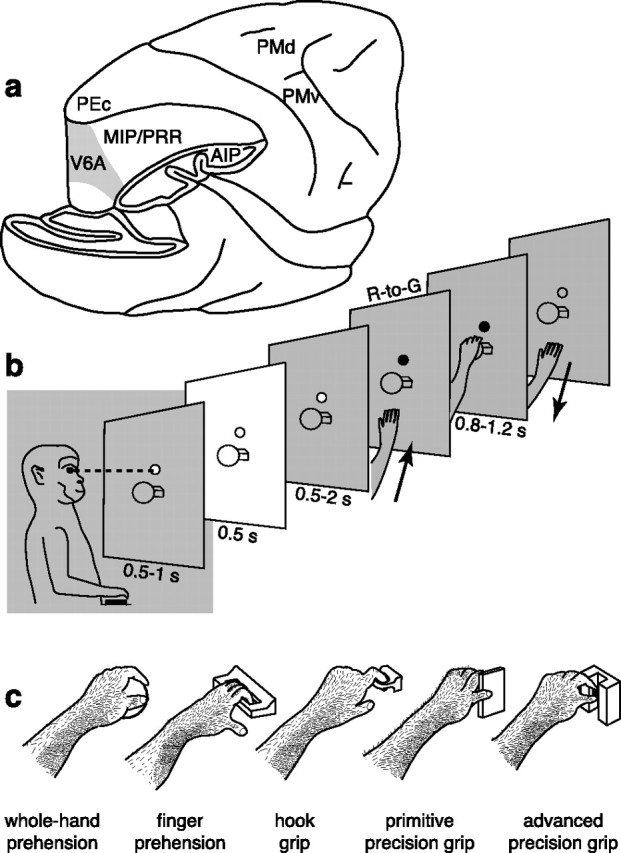
Recording site, reach-to-grasp task, and grip types. a, Brain silhouette with part of the occipital pole and inferior parietal lobule cut away to show the location of the recording site (area V6A, gray shaded) in the anterior bank of the parieto-occipital sulcus. Locations of other parietal and frontal areas are also indicated. b, Time course of the reach-to-grasp task. The animal was trained to fixate at a constant location (fixation LED) shown as a small circle in front of the animal. It reached for and grasped an object (a ball, in this example) visible only at the beginning of the trial (white panel). The R-to-G action was executed in darkness, as indicated by the gray shading. c, Drawing (derived from video frames) of the five objects and grip types used by the monkey. The object to be grasped changed from trial to trial, so requiring different hand preshaping for the accomplishment of the grip. The orientation of the objects was chosen so that wrist orientation was similar in all cases. The five objects were grasped with five different grips: the ball with the whole hand (leftmost drawing), the handle with fingers only, the ring with the index finger only (hook grip), the plate with a primitive precision grip with fingers/thumb opposition, and the stick-in-groove with an advanced precision grip with precise index-finger/thumb opposition. PEc, Area PE caudal; PMd, dorsal premotor cortex; PMv, ventral premotor cortex; PRR, parietal reach region.