
Fig. 2.
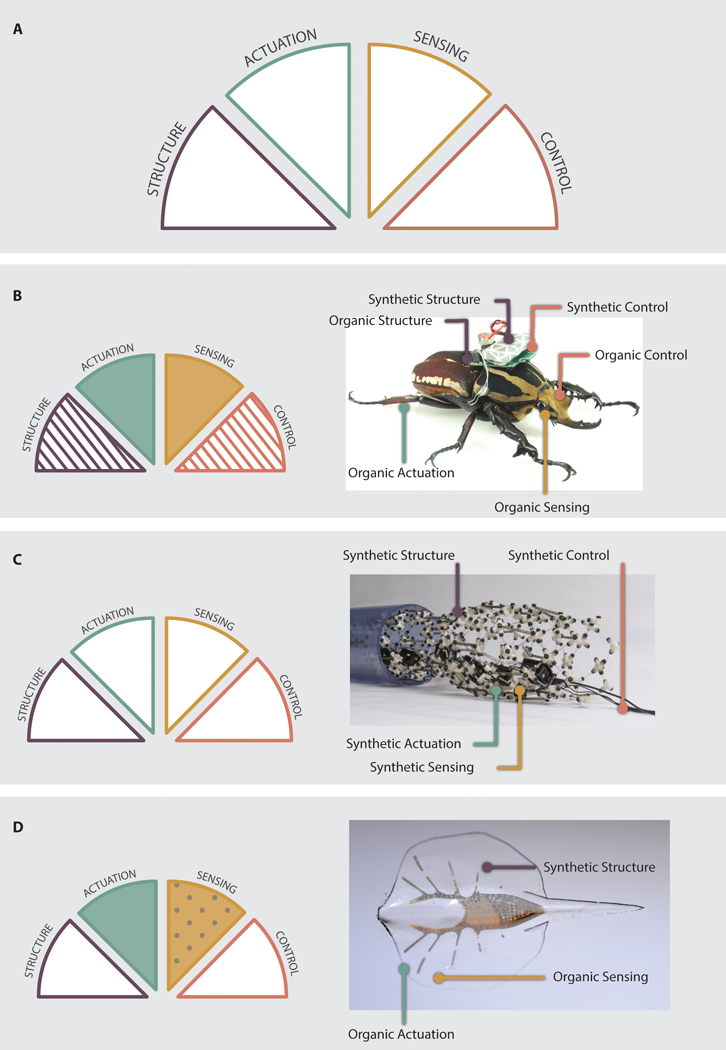
The Robotic Taxonomic Key and examples of its usage. A: The RTK consists of four wedges: Structure, Actuation, Sensing, and Control. Each wedge can be shaded or patterned to visually describe robotic devices. B: Application of the RTK to an organism based robot (146, 147). The device uses a beetle as a base that provides organic structure, actuation, sensing and control. It is, however, augmented with synthetic structures and control. As a result, sensing and actuation have solid colored fills and control and structure have striped fills. C: Application of the RTK to a synthetic robot (148). Since no components are organic and the robot has all four components, each branch has a solid white fill. D: Application of the RTK to a biohybrid device with genetically engineered components (33). The cells have been modified to respond to light; as a consequence, the sensing wedge has a dot pattern.