
Fig. 5.
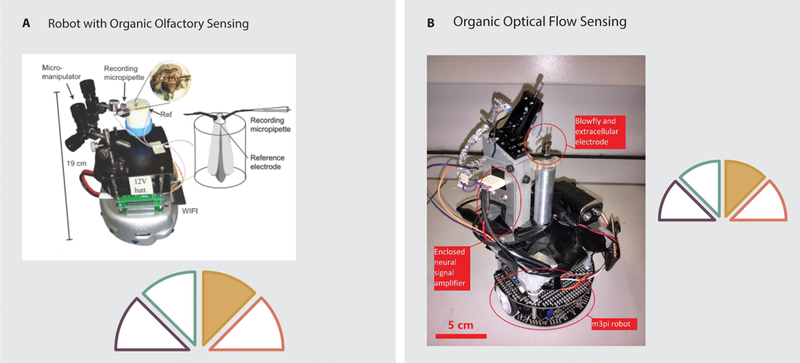
Examples of organic sensing in robotics. A: A robot capable of olfactory sensing via electroantennograms. Electrical signals are recorded from the antennae of an intact moth and used to control the heading of a wheeled robotic platform in order to track odor plumes (66). B: A robot capable of wall following due to the visual sensory input from H1-cells of a blowfly mounted on a wheeled robotic platform (62, 63).