
Fig. 8.
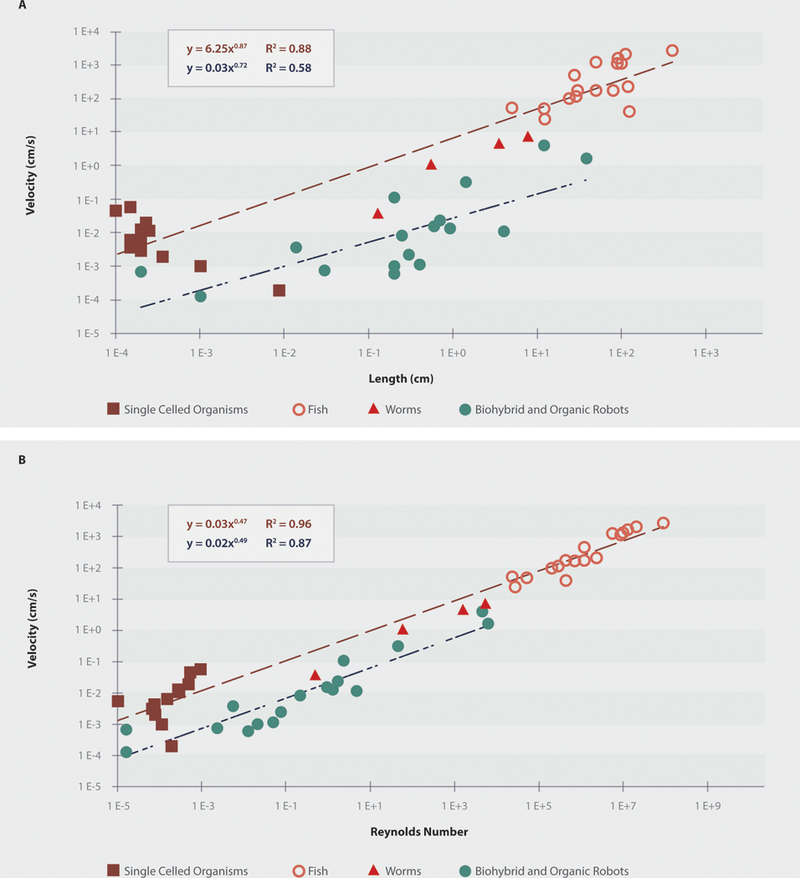
A: The length-velocity scaling of biohybrid and organic robots as compared to animals with similar locomotion types and environments on a log-log scale. Overall, the speed of robotic devices is about two orders of magnitude lower than that of similarly sized animals. B: The Reynolds number-velocity relationship of biohybrid and organic robots compared to animals with similar locomotion types and environments on a log-log scale. Overall, the robotic devices function in a lower Reynolds number regime, indicating the need for improvements in velocity, or attention to appropriate modes of locomotion.