
Figure 2.
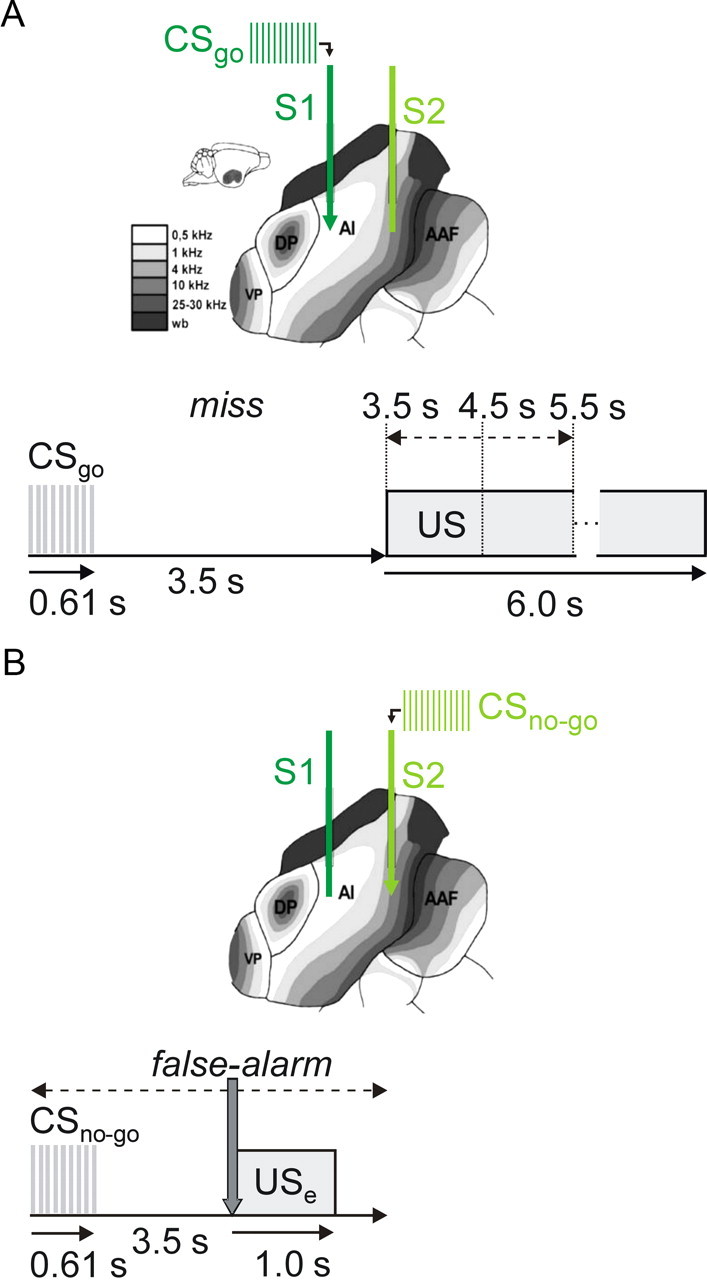
ICMS and behavioral paradigm. A, B, Gerbil AI has a tonotopic organization with a caudal-to-rostral gradient of increasing frequencies. Accordingly, the caudal stimulation electrode S1 was positioned in a lower-frequency part of AI than the rostral electrode S2. The schematic views show the case of a CSgo delivered at S1 (A) and a CSno-go at S2 (B). Using a go/(no-go) active avoidance paradigm, animals were trained in a two-compartment shuttle-box to discriminate between two sites (S1 and S2) of ICMS (0.61 s train length). At the beginning of go-trials (A), ICMS was delivered through one of the two stimulation electrodes (CSgo), and in no-go-trials (B) through the other electrode (CSno-go), respectively. Within a random delay after CSgo onset of 3.5, 4.5, or 5.5 s (indicated by the dashed arrow in A), animals had to change the shuttle-box compartment (go response, CRgo), to avoid a mild electrical foot shock (US, 6.0 s maximum duration, terminated by compartment change). When the CSno-go was presented, animals had to stay in their compartment (no-go response, CRno-go) to avoid a mild electrical error-footshock (USe) with 1 s duration, given immediately after a compartment change (gray arrow in B) within the first 3.5 s after CSno-go onset. Behavioral responses were sorted in one of four categories: hit (CRgo to the CSgo), miss (CRno-go to the CSgo), false-alarm (CRgo to the CSno-go), and correct-rejection (CRno-go to the CSno-go).