
Figure 1.
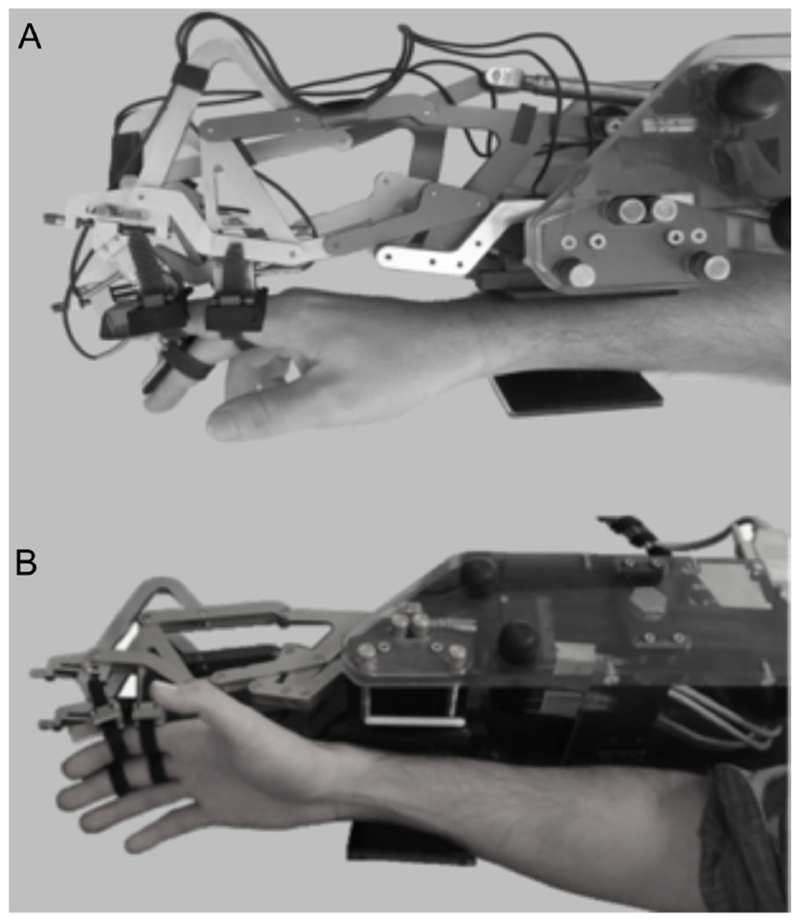
The FINGER robot used to perform the proprioception task, as seen from (A) lateral and (B) oblique views. The index and middle fingers attach to the robot and are guided through finger-crossing movements during the proprioception task. The robot aligns with the plane of the subject’s index and middle fingers, maintaining a naturalistic gap between the fingers and eliminating any somatosensory input that might otherwise be generated upon finger crossing.