
Figure 5.
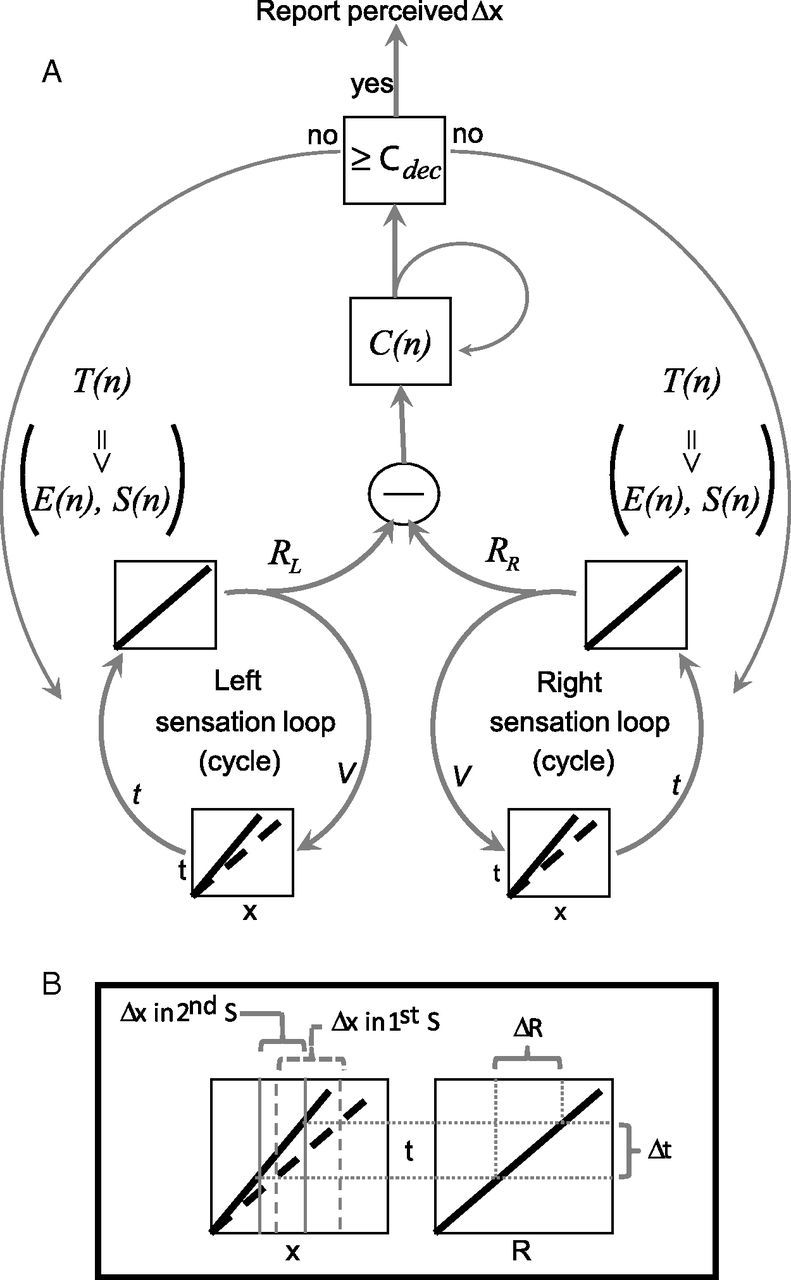
A conceptual model for hierarchical motor-sensory convergence implicated by this study. A, Left and right sensation loops control hand velocity (V) to convert position signals (x) to temporal signals (t); two different conversions, related to two different V values, are indicated by the solid and dashed curves. The same loops recode the t signals as internal representations (R). The bilateral R signals are subtracted from each other, and the difference is integrated in C(n) according to Equations 3 and 4. The left and right sensation loops continuously execute whisking cycles as long as C < Cdec, with cycle duration, and as a result also set point and amplitude, being controlled by higher loops. When C ≥ Cdec, the system exits the active sensation mode and reports the perceived offset. B, Dependence of space-to-time conversion on hand velocity. When V decreases, as occurred in Session 2, smaller Δx offsets are mapped to Δt delays that previously (e.g., in Session 1) represented larger Δx offsets. The transformation from t to R remains unchanged.