
Figure 4.
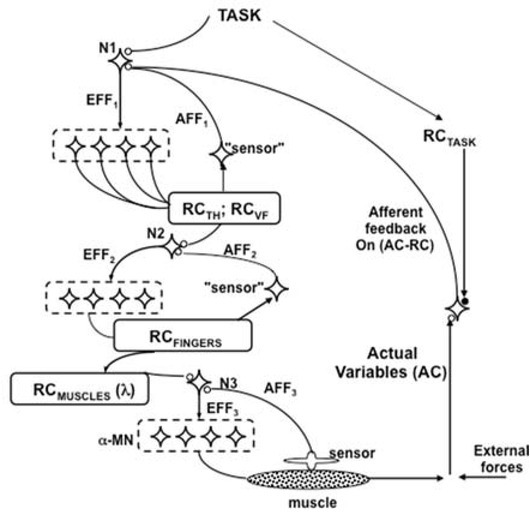
A scheme of hierarchical control of the hand within the idea of control with referent configurations (RCs) of the body. At the top level, a low-dimensional set of referent values for salient, task-specific variables is reflected in the RC. A sequence of few-to-many transformations results in higher-dimensional RCs at the digit level and muscle level. Local feedback loops ensure stability with respect to the variables specified by the input. The global feedback loop ensures that the actual body configuration moves towards one of the solutions compatible with the task RC. At each level, inputs to a neuronal pool (N1, N2, and N3) are combined with afferent feedback (AFF) to produce the output (efferent signals, EFF). At the lowest level, elements are alpha-motoneurons and their referent coordinates correspond to the thresholds of the tonic stretch reflex (lambda).