
Figure 6.
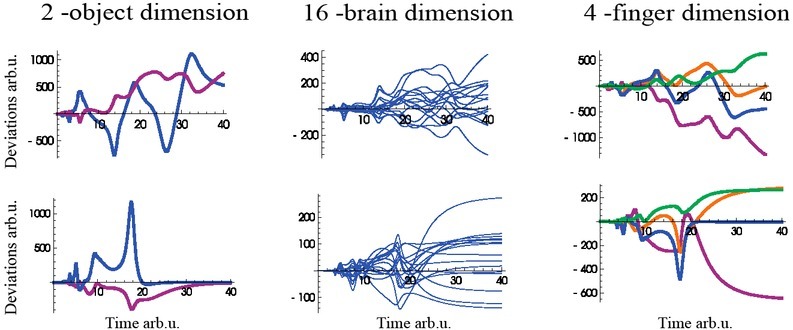
Examples of successful (lower panels) and unsuccessful (upper panels) search for the new equilibrium control. We show coordinate variables as functions of time in arbitrary units. First column: deviations of two controlled coordinates from their prescribed value – zero. The second column: dynamics of the hypothetical elemental variables tend to some asymptotic values for successful control. Third column: dynamics of motor variables. One sees the dynamics of transition from the old equilibrium position to the new one. The scales are arbitrary since the evolution equations have no dimension.