
Figure 10.
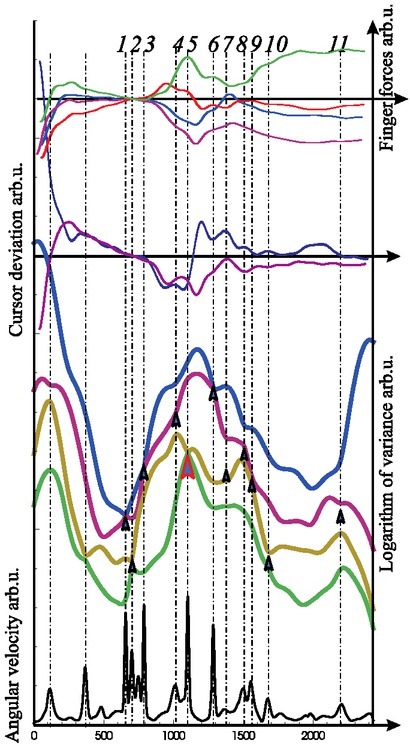
The angular velocity R1(t) of rotation of the basis of the covariance matrix eigenvectors as function of time (bottom, solid line, arbitrary units). Logarithms of the eigenvalues Ck(t) of the covariance matrix (four bold curves above the velocity). The average of the covariance matrix was computed over Y = 100 sequential time points with the interval of 10-2 s between the points. The switching of the feedback eventually took place in the domains of ”avoid crossings” discussed, marked here by arrows, and corresponding to the maxima of the angular velocity. On the top of the plots, the finger forces and the cursor coordinates, corresponding to the dependencies in Figure 8 averaged over the same time intervals Y = 100, are shown for comparison. The ”avoid crossing” of the three eigenvalues occurs for the 4-th, 7-th, and 8-th intersections. The strongest contribution comes from the 5-th crossing, which presumably is relevant to changing of the direction in the two-dimensional orthogonal subspace.