
Fig. 10.
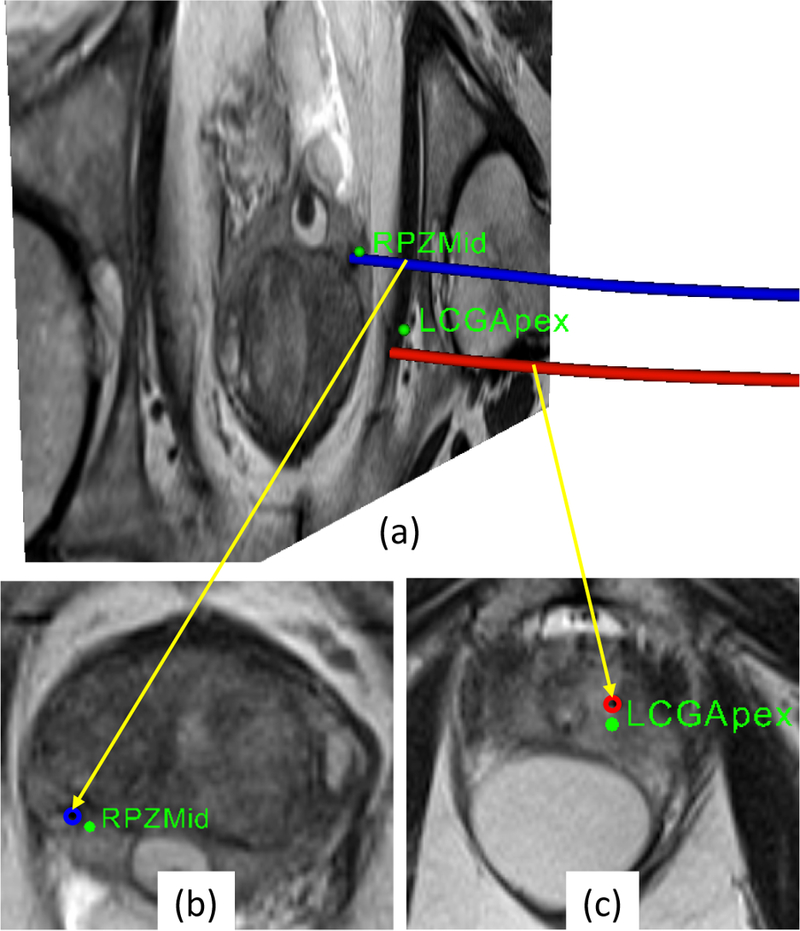
(a)Snapshot of 3D view with an MR image of prostate gland showing desired targets (green spheres) and actual needle trajectories segmented from the MRI volume images, (b- c)zoomed-in view of transverse image slice showing targets and intersection of the image slice with corresponding needle trajec- tories(the blue and red circles) from the confirmation images.