
Figure 7.
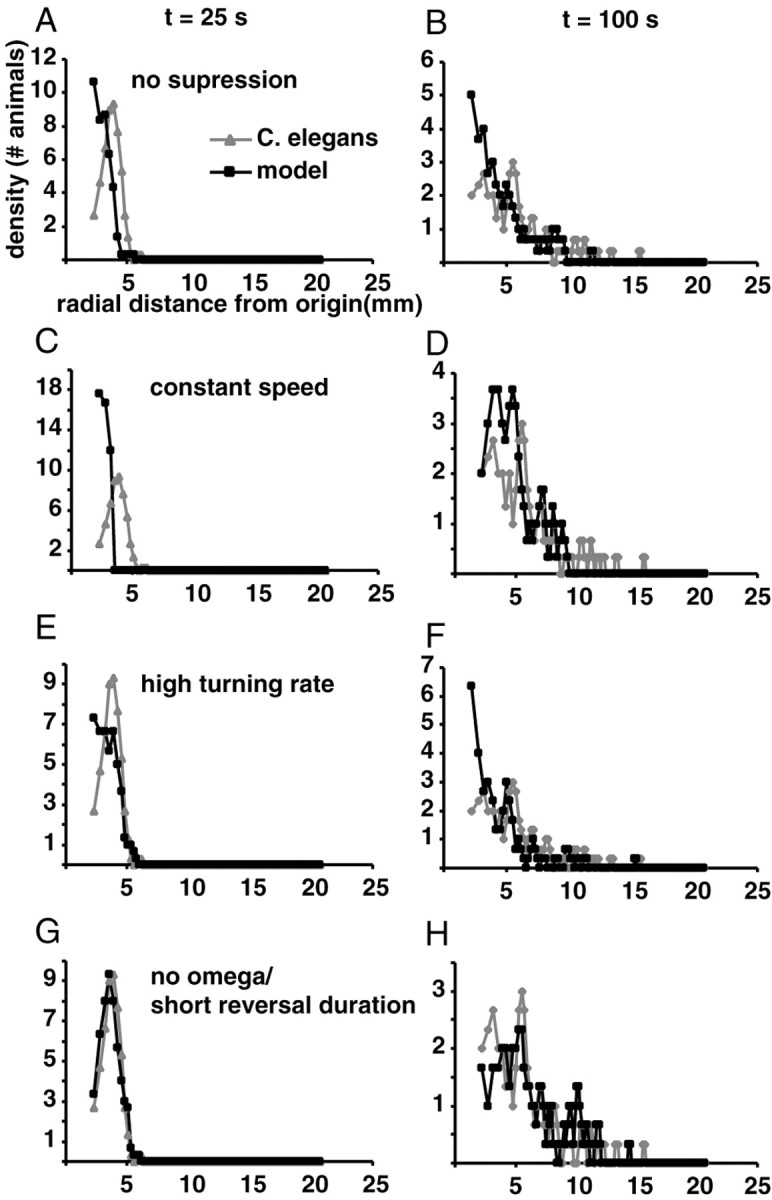
Effects of varying parameters on the locomotory behavior of the model. A, B, Radial dispersion at 25 and 100 sec of modeled animals that use the same hazard function for the first reversal as they do for subsequent reversals. C, D, Radial dispersion of modeled animals that have a constant speed of 111 μm/sec. E, F, Radial dispersion of modeled animals that have a high turning rate bias SD of 6°. G, H, Radial dispersion of modeled animals whose reversal duration = 1 sec and who never terminate their reversals with an omega turn.